 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Intelligent Agents to Trustworthy Human-Centred Multiagent Systems
Oct 05, 2022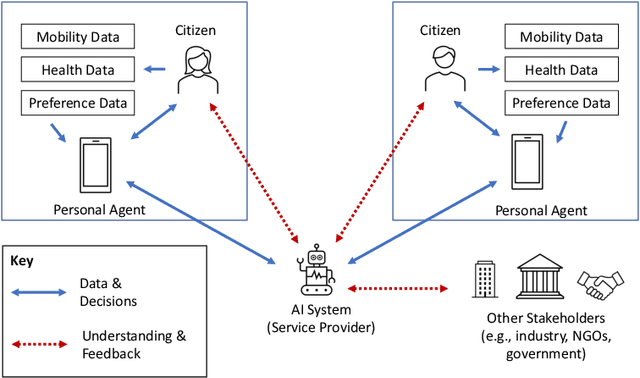
The Agents, Interaction and Complexity research group at the University of Southampton has a long track record of research in multiagent systems (MAS). We have made substantial scientific contributions across learning in MAS, game-theoretic techniques for coordinating agent systems, and formal methods for representation and reasoning. We highlight key results achieved by the group and elaborate on recent work and open research challenges in developing trustworthy autonomous systems and deploying human-centred AI systems that aim to support societal good.
* Appears in the Special Issue on Multi-Agent Systems Research in the United Kingdom
Industry Led Use-Case Development for Human-Swarm Operations
Jul 24, 2022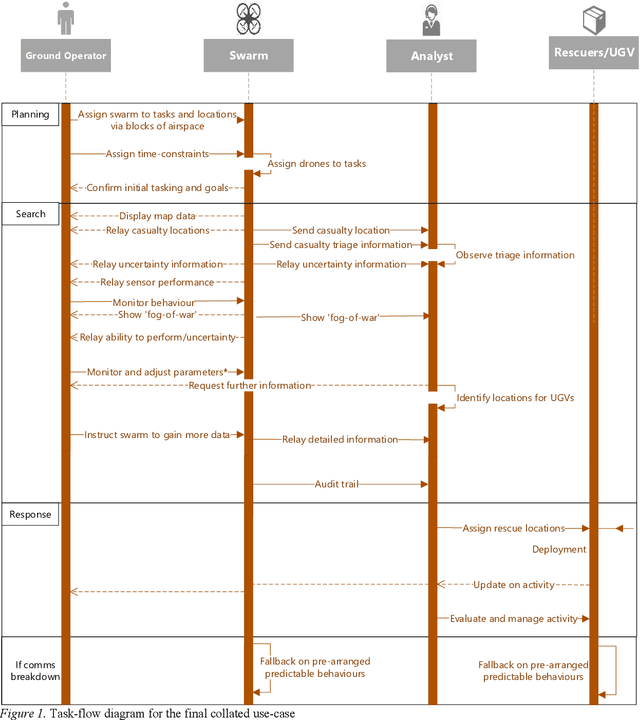
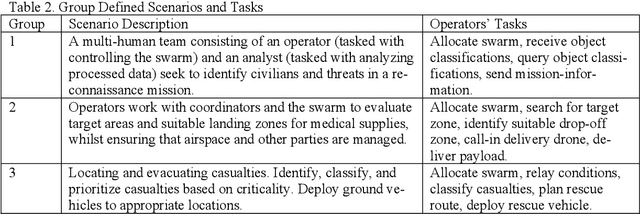
In the domain of unmanned vehicles, autonomous robotic swarms promise to deliver increased efficiency and collective autonomy. How these swarms will operate in the future, and what communication requirements and operational boundaries will arise are yet to be sufficiently defined. A workshop was conducted with 11 professional unmanned-vehicle operators and designers with the objective of identifying use-cases for developing and testing robotic swarms. Three scenarios were defined by experts and were then compiled to produce a single use case outlining the scenario, objectives, agents, communication requirements and stages of operation when collaborating with highly autonomous swarms. Our compiled use case is intended for researchers, designers, and manufacturers alike to test and tailor their design pipeline to accommodate for some of the key issues in human-swarm ininteraction. Examples of application include informing simulation development, forming the basis of further design workshops, and identifying trust issues that may arise between human operators and the swarm.
Collective Decision Making in Communication-Constrained Environments
Jul 19, 2022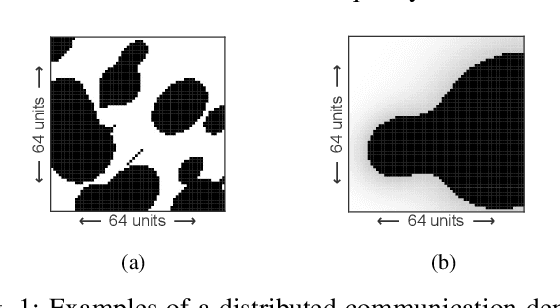
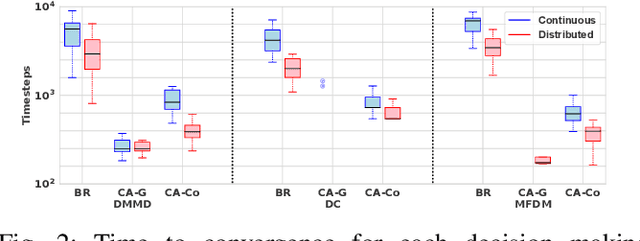
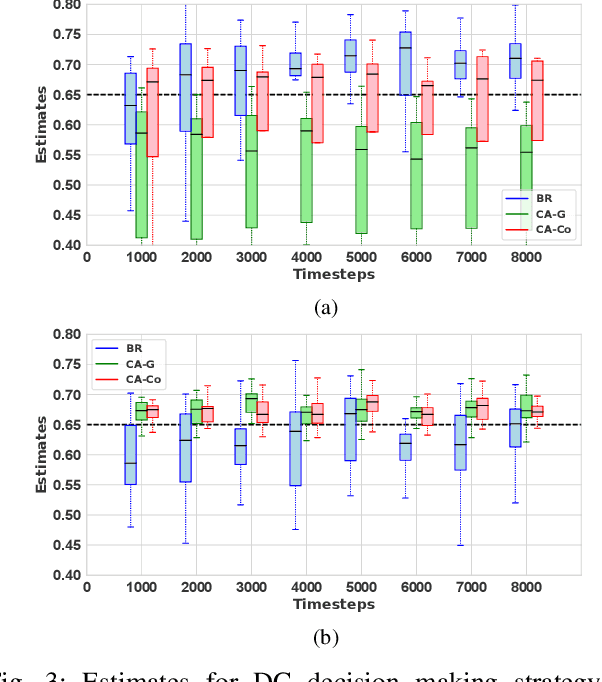
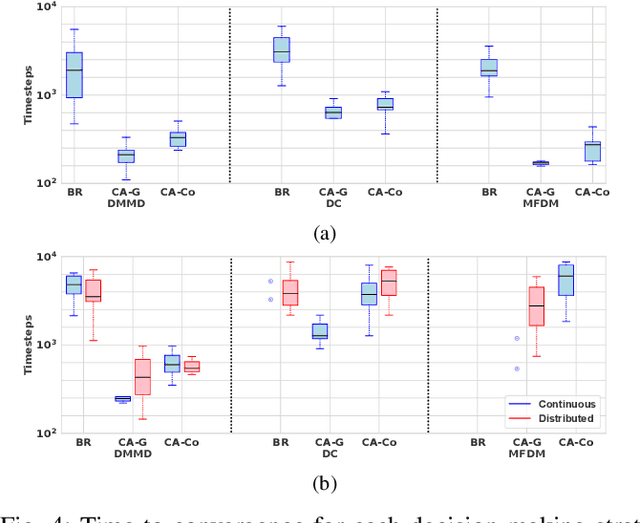
One of the main tasks for autonomous robot swarms is to collectively decide on the best available option. Achieving that requires a high quality communication between the agents that may not be always available in a real world environment. In this paper we introduce the communication-constrained collective decision-making problem where some areas of the environment limit the agents' ability to communicate, either by reducing success rate or blocking the communication channels. We propose a decentralised algorithm for mapping environmental features for robot swarms as well as improving collective decision making in communication-limited environments without prior knowledge of the communication landscape. Our results show that making a collective aware of the communication environment can improve the speed of convergence in the presence of communication limitations, at least 3 times faster, without sacrificing accuracy.
Repository for Reusing Artifacts of Artificial Neural Networks
Mar 30, 2020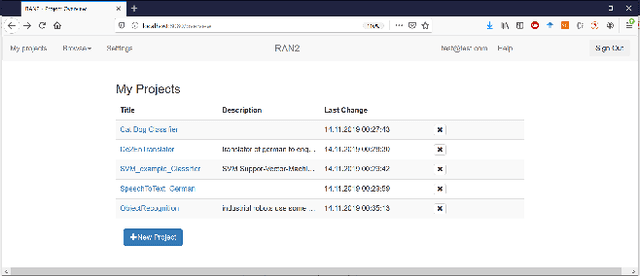
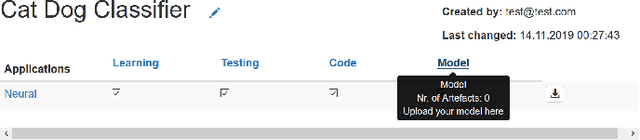
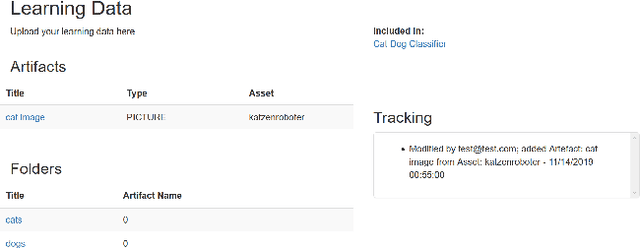
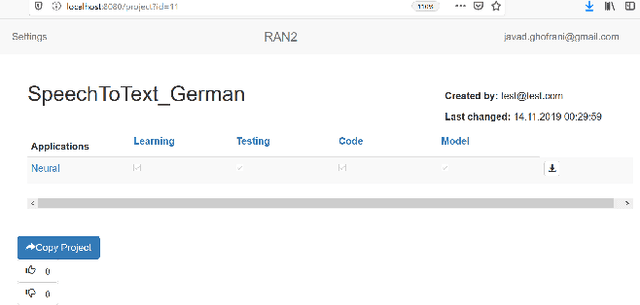
Artificial Neural Networks (ANNs) replaced conventional software systems in various domains such as machine translation, natural language processing, and image processing. So, why do we need an repository for artificial neural networks? Those systems are developed with labeled data and we have strong dependencies between the data that is used for training and testing our network. Another challenge is the data quality as well as reuse-ability. There we are trying to apply concepts from classic software engineering that is not limited to the model, while data and code haven't been dealt with mostly in other projects. The first question that comes to mind might be, why don't we use GitHub, a well known widely spread tool for reuse, for our issue. And the reason why is that GitHub, although very good in its class is not developed for machine learning appliances and focuses more on software reuse. In addition to that GitHub does not allow to execute the code directly on the platform which would be very convenient for collaborative work on one project.
Flora robotica -- An Architectural System Combining Living Natural Plants and Distributed Robots
Sep 13, 2017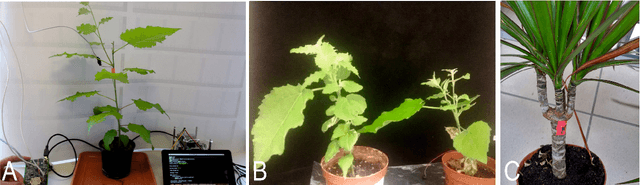

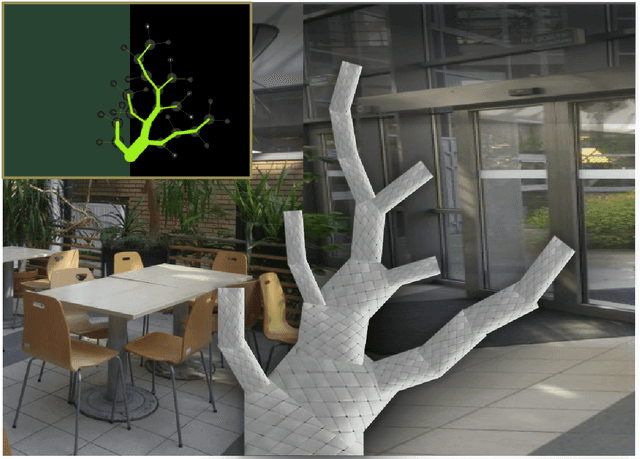
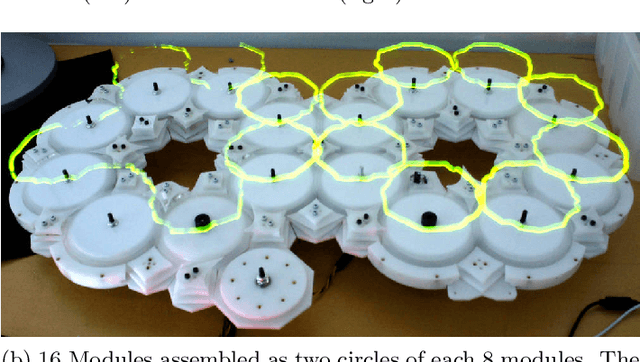
Key to our project flora robotica is the idea of creating a bio-hybrid system of tightly coupled natural plants and distributed robots to grow architectural artifacts and spaces. Our motivation with this ground research project is to lay a principled foundation towards the design and implementation of living architectural systems that provide functionalities beyond those of orthodox building practice, such as self-repair, material accumulation and self-organization. Plants and robots work together to create a living organism that is inhabited by human beings. User-defined design objectives help to steer the directional growth of the plants, but also the system's interactions with its inhabitants determine locations where growth is prohibited or desired (e.g., partitions, windows, occupiable space). We report our plant species selection process and aspects of living architecture. A leitmotif of our project is the rich concept of braiding: braids are produced by robots from continuous material and serve as both scaffolds and initial architectural artifacts before plants take over and grow the desired architecture. We use light and hormones as attraction stimuli and far-red light as repelling stimulus to influence the plants. Applied sensors range from simple proximity sensing to detect the presence of plants to sophisticated sensing technology, such as electrophysiology and measurements of sap flow. We conclude by discussing our anticipated final demonstrator that integrates key features of flora robotica, such as the continuous growth process of architectural artifacts and self-repair of living architecture.