 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigning Multispecies Worlds for Robots, Cats, and Humans
Feb 23, 2024



We reflect on the design of a multispecies world centred around a bespoke enclosure in which three cats and a robot arm coexist for six hours a day during a twelve-day installation as part of an artist-led project. In this paper, we present the project's design process, encompassing various interconnected components, including the cats, the robot and its autonomous systems, the custom end-effectors and robot attachments, the diverse roles of the humans-in-the-loop, and the custom-designed enclosure. Subsequently, we provide a detailed account of key moments during the deployment and discuss the design implications for future multispecies systems. Specifically, we argue that designing the technology and its interactions is not sufficient, but that it is equally important to consider the design of the `world' in which the technology operates. Finally, we highlight the necessity of human involvement in areas such as breakdown recovery, animal welfare, and their role as audience.
Charting Ethical Tensions in Multispecies Technology Research through Beneficiary-Epistemology Space
Feb 23, 2024While ethical challenges are widely discussed in HCI, far less is reported about the ethical processes that researchers routinely navigate. We reflect on a multispecies project that negotiated an especially complex ethical approval process. Cat Royale was an artist-led exploration of creating an artwork to engage audiences in exploring trust in autonomous systems. The artwork took the form of a robot that played with three cats. Gaining ethical approval required an extensive dialogue with three Institutional Review Boards (IRBs) covering computer science, veterinary science and animal welfare, raising tensions around the welfare of the cats, perceived benefits and appropriate methods, and reputational risk to the University. To reveal these tensions we introduce beneficiary-epistemology space, that makes explicit who benefits from research (humans or animals) and underlying epistemologies. Positioning projects and IRBs in this space can help clarify tensions and highlight opportunities to recruit additional expertise.
Industry Led Use-Case Development for Human-Swarm Operations
Jul 24, 2022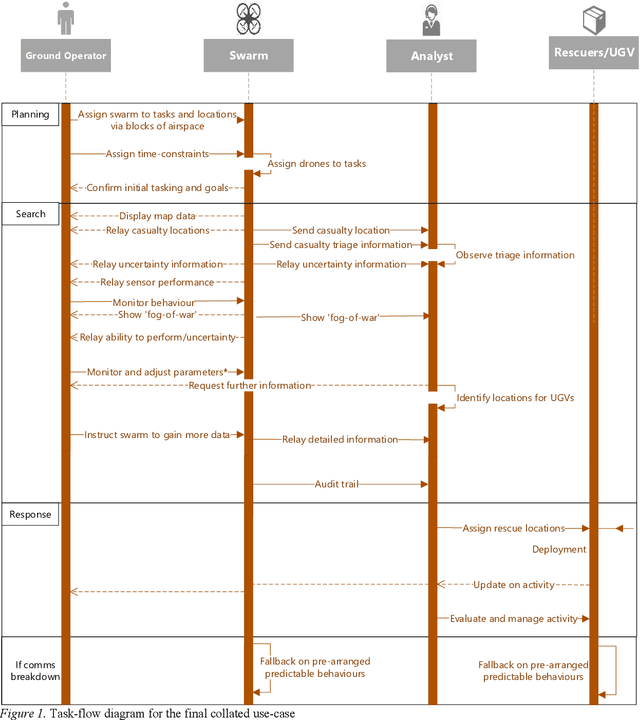
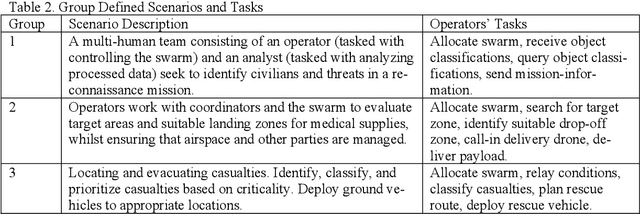
In the domain of unmanned vehicles, autonomous robotic swarms promise to deliver increased efficiency and collective autonomy. How these swarms will operate in the future, and what communication requirements and operational boundaries will arise are yet to be sufficiently defined. A workshop was conducted with 11 professional unmanned-vehicle operators and designers with the objective of identifying use-cases for developing and testing robotic swarms. Three scenarios were defined by experts and were then compiled to produce a single use case outlining the scenario, objectives, agents, communication requirements and stages of operation when collaborating with highly autonomous swarms. Our compiled use case is intended for researchers, designers, and manufacturers alike to test and tailor their design pipeline to accommodate for some of the key issues in human-swarm ininteraction. Examples of application include informing simulation development, forming the basis of further design workshops, and identifying trust issues that may arise between human operators and the swarm.