 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndustry Led Use-Case Development for Human-Swarm Operations
Paper and Code
Jul 24, 2022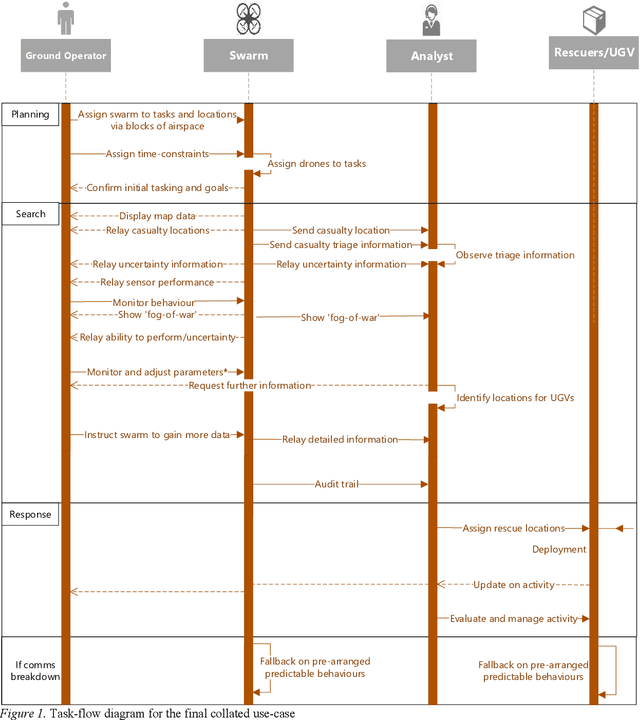
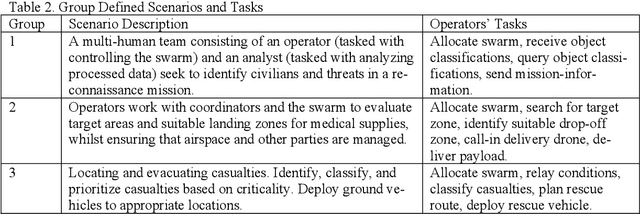
In the domain of unmanned vehicles, autonomous robotic swarms promise to deliver increased efficiency and collective autonomy. How these swarms will operate in the future, and what communication requirements and operational boundaries will arise are yet to be sufficiently defined. A workshop was conducted with 11 professional unmanned-vehicle operators and designers with the objective of identifying use-cases for developing and testing robotic swarms. Three scenarios were defined by experts and were then compiled to produce a single use case outlining the scenario, objectives, agents, communication requirements and stages of operation when collaborating with highly autonomous swarms. Our compiled use case is intended for researchers, designers, and manufacturers alike to test and tailor their design pipeline to accommodate for some of the key issues in human-swarm ininteraction. Examples of application include informing simulation development, forming the basis of further design workshops, and identifying trust issues that may arise between human operators and the swarm.