 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlora robotica -- An Architectural System Combining Living Natural Plants and Distributed Robots
Sep 13, 2017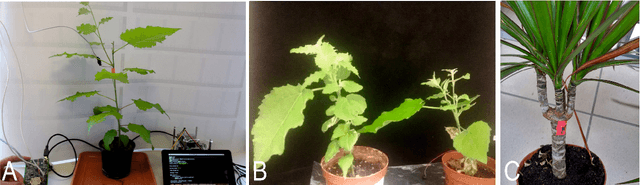

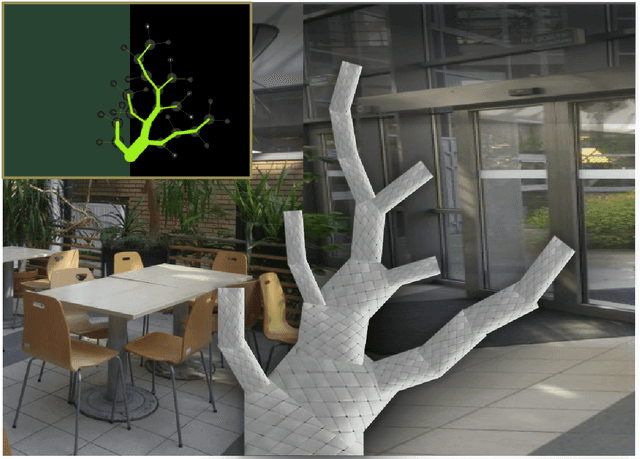
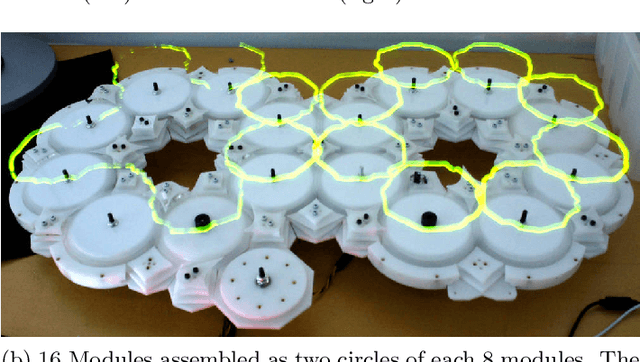
Key to our project flora robotica is the idea of creating a bio-hybrid system of tightly coupled natural plants and distributed robots to grow architectural artifacts and spaces. Our motivation with this ground research project is to lay a principled foundation towards the design and implementation of living architectural systems that provide functionalities beyond those of orthodox building practice, such as self-repair, material accumulation and self-organization. Plants and robots work together to create a living organism that is inhabited by human beings. User-defined design objectives help to steer the directional growth of the plants, but also the system's interactions with its inhabitants determine locations where growth is prohibited or desired (e.g., partitions, windows, occupiable space). We report our plant species selection process and aspects of living architecture. A leitmotif of our project is the rich concept of braiding: braids are produced by robots from continuous material and serve as both scaffolds and initial architectural artifacts before plants take over and grow the desired architecture. We use light and hormones as attraction stimuli and far-red light as repelling stimulus to influence the plants. Applied sensors range from simple proximity sensing to detect the presence of plants to sophisticated sensing technology, such as electrophysiology and measurements of sap flow. We conclude by discussing our anticipated final demonstrator that integrates key features of flora robotica, such as the continuous growth process of architectural artifacts and self-repair of living architecture.