 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCo-Optimization of Robot Design and Control: Enhancing Performance and Understanding Design Complexity
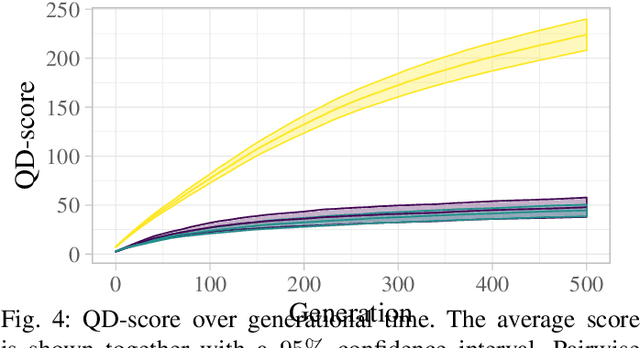
Sep 13, 2024The design (shape) of a robot is usually decided before the control is implemented. This might limit how well the design is adapted to a task, as the suitability of the design is given by how well the robot performs in the task, which requires both a design and a controller. The co-optimization or simultaneous optimization of the design and control of robots addresses this limitation by producing a design and control that are both adapted to the task. In this paper, we investigate some of the challenges inherent in the co-optimization of design and control. We show that retraining the controller of a robot with additional resources after the co-optimization process terminates significantly improves the robot's performance. In addition, we demonstrate that the resources allocated to training the controller for each design influence the design complexity, where simpler designs are associated with lower training budgets. The experimentation is conducted in four publicly available simulation environments for co-optimization of design and control, making the findings more applicable to the general case. The results presented in this paper hope to guide other practitioners in the co-optimization of design and control of robots.
Evolution of linkages for prototyping of linkage based robots
May 02, 2023Prototyping robotic systems is a time consuming process. Computer aided design, however, might speed up the process significantly. Quality-diversity evolutionary approaches optimise for novelty as well as performance, and can be used to generate a repertoire of diverse designs. This design repertoire could be used as a tool to guide a designer and kick-start the rapid prototyping process. This paper explores this idea in the context of mechanical linkage based robots. These robots can be a good test-bed for rapid prototyping, as they can be modified quickly for swift iterations in design. We compare three evolutionary algorithms for optimising 2D mechanical linkages: 1) a standard evolutionary algorithm, 2) the multi-objective algorithm NSGA-II, and 3) the quality-diversity algorithm MAP-Elites. Some of the found linkages are then realized on a physical hexapod robot through a prototyping process, and tested on two different floors. We find that all the tested approaches, except the standard evolutionary algorithm, are capable of finding mechanical linkages that creates a path similar to a specified desired path. However, the quality-diversity approaches that had the length of the linkage as a behaviour descriptor were the most useful when prototyping. This was due to the quality-diversity approaches having a larger variety of similar designs to choose from, and because the search could be constrained by the behaviour descriptors to make linkages that were viable for construction on our hexapod platform.
Central pattern generators evolved for real-time adaptation
Oct 14, 2022
For a robot to be both autonomous and collaborative requires the ability to adapt its movement to a variety of external stimuli, whether these come from humans or other robots. Typically, legged robots have oscillation periods explicitly defined as a control parameter, limiting the adaptability of walking gaits. Here we demonstrate a virtual quadruped robot employing a bio-inspired central pattern generator (CPG) that can spontaneously synchronize its movement to a range of rhythmic stimuli. Multi-objective evolutionary algorithms were used to optimize the variation of movement speed and direction as a function of the brain stem drive and the center of mass control respectively. This was followed by optimization of an additional layer of neurons that filters fluctuating inputs. As a result, a range of CPGs were able to adjust their gait pattern and/or frequency to match the input period. We show how this can be used to facilitate coordinated movement despite differences in morphology, as well as to learn new movement patterns.
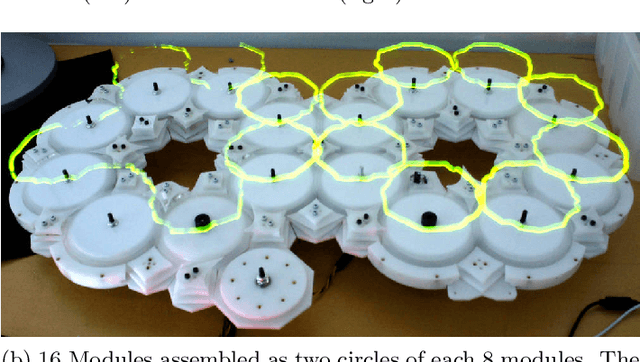
Centralized and Decentralized Control in Modular Robots and Their Effect on Morphology
Jun 27, 2022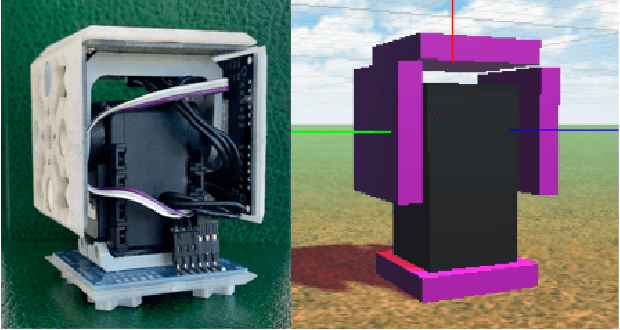

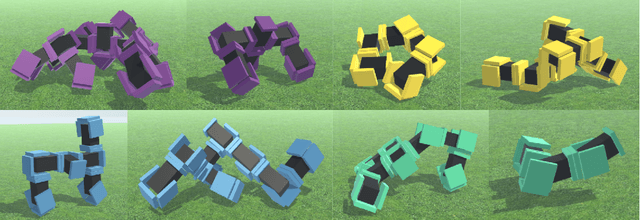
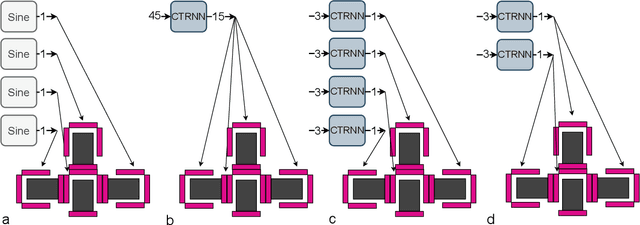
In Evolutionary Robotics, evolutionary algorithms are used to co-optimize morphology and control. However, co-optimizing leads to different challenges: How do you optimize a controller for a body that often changes its number of inputs and outputs? Researchers must then make some choice between centralized or decentralized control. In this article, we study the effects of centralized and decentralized controllers on modular robot performance and morphologies. This is done by implementing one centralized and two decentralized continuous time recurrent neural network controllers, as well as a sine wave controller for a baseline. We found that a decentralized approach that was more independent of morphology size performed significantly better than the other approaches. It also worked well in a larger variety of morphology sizes. In addition, we highlighted the difficulties of implementing centralized control for a changing morphology, and saw that our centralized controller struggled more with early convergence than the other approaches. Our findings indicate that duplicated decentralized networks are beneficial when evolving both the morphology and control of modular robots. Overall, if these findings translate to other robot systems, our results and issues encountered can help future researchers make a choice of control method when co-optimizing morphology and control.
Rapid rhythmic entrainment in bio-inspired central pattern generators
Jun 03, 2022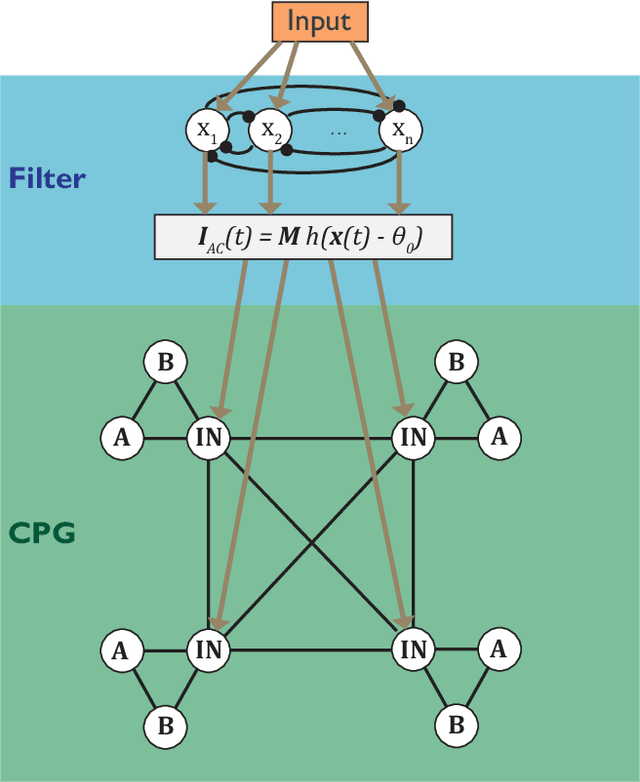
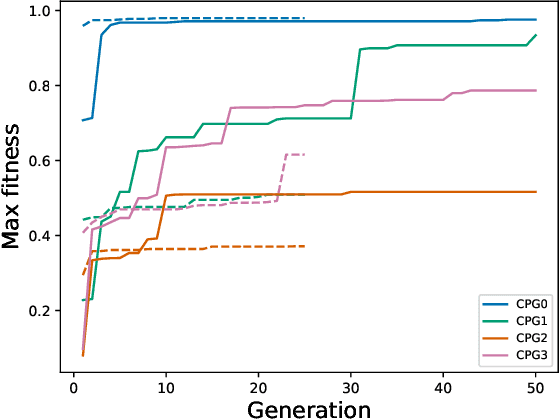
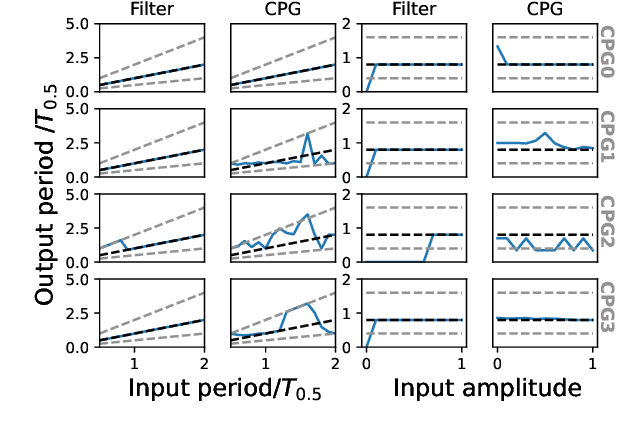
Entrainment of movement to a periodic stimulus is a characteristic intelligent behaviour in humans and an important goal for adaptive robotics. We demonstrate a quadruped central pattern generator (CPG), consisting of modified Matsuoka neurons, that spontaneously adjusts its period of oscillation to that of a periodic input signal. This is done by simple forcing, with the aid of a filtering network as well as a neural model with tonic input-dependent oscillation period. We first use the NSGA3 algorithm to evolve the CPG parameters, using separate fitness functions for period tunability, limb homogeneity and gait stability. Four CPGs, maximizing different weighted averages of the fitness functions, are then selected from the Pareto front and each is used as a basis for optimizing a filter network. Different numbers of neurons are tested for each filter network. We find that period tunability in particular facilitates robust entrainment, that bounding gaits entrain more easily than walking gaits, and that more neurons in the filter network are beneficial for pre-processing input signals. The system that we present can be used in conjunction with sensory feedback to allow low-level adaptive and robust behaviour in walking robots.
MAP-Elites enables Powerful Stepping Stones and Diversity for Modular Robotics
Dec 08, 2020


In modular robotics, modules can be reconfigured to change the morphology of the robot, making it able to adapt for specific tasks. However, optimizing both the body and control is a difficult challenge due to the intricate relationship between fine-tuning control and morphological changes that can invalidate such optimizations. To solve this challenge we compare three different Evolutionary Algorithms on their capacity to optimize morphologies in modular robotics. We compare two objective-based search algorithms, with MAP-Elites. To understand the benefit of diversity we transition the evolved populations into two difficult environments to see if diversity can have an impact on solving complex environments. In addition, we analyse the genealogical ancestry to shed light on the notion of stepping stones as key to enable high performance. The results show that MAP-Elites is capable of evolving the highest performing solutions in addition to generating the largest morphological diversity. For the transition between environments the results show that MAP-Elites is better at regaining performance by promoting morphological diversity. With the analysis of genealogical ancestry we show that MAP-Elites produces more diverse and higher performing stepping stones than the other objective-based search algorithms. Transitioning the populations to more difficult environments show the utility of morphological diversity, while the analysis of stepping stones show a strong correlation between diversity of ancestry and maximum performance on the locomotion task. The paper shows the advantage of promoting diversity for solving a locomotion task in different environments for modular robotics. By showing that the quality and diversity of stepping stones in Evolutionary Algorithms is an important factor for overall performance we have opened up a new area of analysis and results.
Quality and Diversity in Evolutionary Modular Robotics
Aug 05, 2020
In Evolutionary Robotics a population of solutions is evolved to optimize robots that solve a given task. However, in traditional Evolutionary Algorithms, the population of solutions tends to converge to local optima when the problem is complex or the search space is large, a problem known as premature convergence. Quality Diversity algorithms try to overcome premature convergence by introducing additional measures that reward solutions for being different while not necessarily performing better. In this paper we compare a single objective Evolutionary Algorithm with two diversity promoting search algorithms; a Multi-Objective Evolutionary Algorithm and MAP-Elites a Quality Diversity algorithm, for the difficult problem of evolving control and morphology in modular robotics. We compare their ability to produce high performing solutions, in addition to analyze the evolved morphological diversity. The results show that all three search algorithms are capable of evolving high performing individuals. However, the Quality Diversity algorithm is better adept at filling all niches with high-performing solutions. This confirms that Quality Diversity algorithms are well suited for evolving modular robots and can be an important means of generating repertoires of high performing solutions that can be exploited both at design- and runtime.
Flora robotica -- An Architectural System Combining Living Natural Plants and Distributed Robots
Sep 13, 2017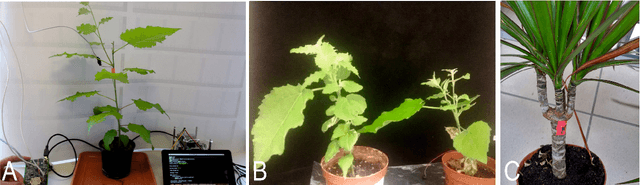

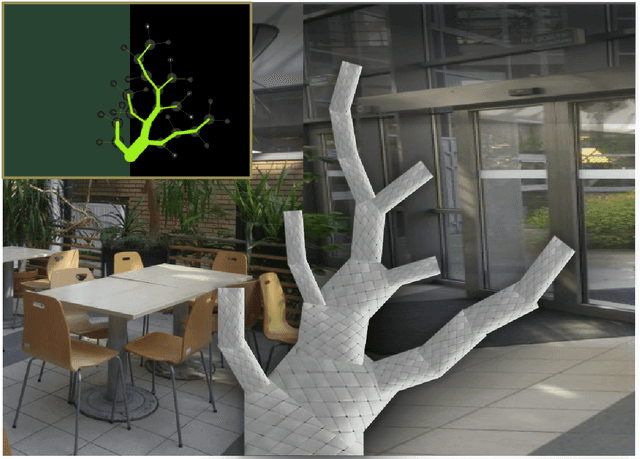
Key to our project flora robotica is the idea of creating a bio-hybrid system of tightly coupled natural plants and distributed robots to grow architectural artifacts and spaces. Our motivation with this ground research project is to lay a principled foundation towards the design and implementation of living architectural systems that provide functionalities beyond those of orthodox building practice, such as self-repair, material accumulation and self-organization. Plants and robots work together to create a living organism that is inhabited by human beings. User-defined design objectives help to steer the directional growth of the plants, but also the system's interactions with its inhabitants determine locations where growth is prohibited or desired (e.g., partitions, windows, occupiable space). We report our plant species selection process and aspects of living architecture. A leitmotif of our project is the rich concept of braiding: braids are produced by robots from continuous material and serve as both scaffolds and initial architectural artifacts before plants take over and grow the desired architecture. We use light and hormones as attraction stimuli and far-red light as repelling stimulus to influence the plants. Applied sensors range from simple proximity sensing to detect the presence of plants to sophisticated sensing technology, such as electrophysiology and measurements of sap flow. We conclude by discussing our anticipated final demonstrator that integrates key features of flora robotica, such as the continuous growth process of architectural artifacts and self-repair of living architecture.