 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAP-Elites enables Powerful Stepping Stones and Diversity for Modular Robotics
Dec 08, 2020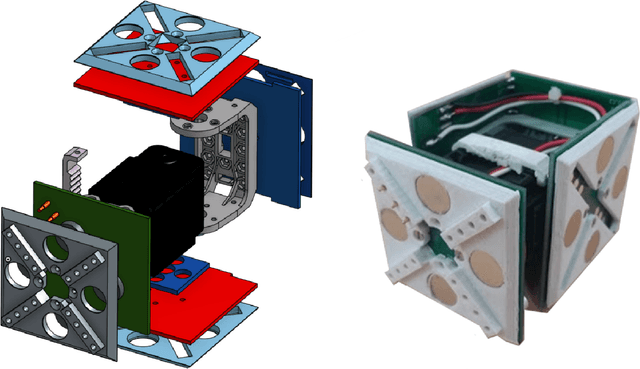

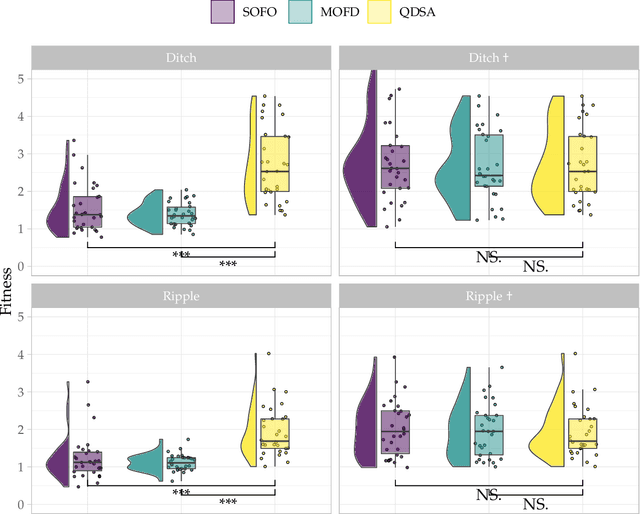

In modular robotics, modules can be reconfigured to change the morphology of the robot, making it able to adapt for specific tasks. However, optimizing both the body and control is a difficult challenge due to the intricate relationship between fine-tuning control and morphological changes that can invalidate such optimizations. To solve this challenge we compare three different Evolutionary Algorithms on their capacity to optimize morphologies in modular robotics. We compare two objective-based search algorithms, with MAP-Elites. To understand the benefit of diversity we transition the evolved populations into two difficult environments to see if diversity can have an impact on solving complex environments. In addition, we analyse the genealogical ancestry to shed light on the notion of stepping stones as key to enable high performance. The results show that MAP-Elites is capable of evolving the highest performing solutions in addition to generating the largest morphological diversity. For the transition between environments the results show that MAP-Elites is better at regaining performance by promoting morphological diversity. With the analysis of genealogical ancestry we show that MAP-Elites produces more diverse and higher performing stepping stones than the other objective-based search algorithms. Transitioning the populations to more difficult environments show the utility of morphological diversity, while the analysis of stepping stones show a strong correlation between diversity of ancestry and maximum performance on the locomotion task. The paper shows the advantage of promoting diversity for solving a locomotion task in different environments for modular robotics. By showing that the quality and diversity of stepping stones in Evolutionary Algorithms is an important factor for overall performance we have opened up a new area of analysis and results.
Quality and Diversity in Evolutionary Modular Robotics
Aug 05, 2020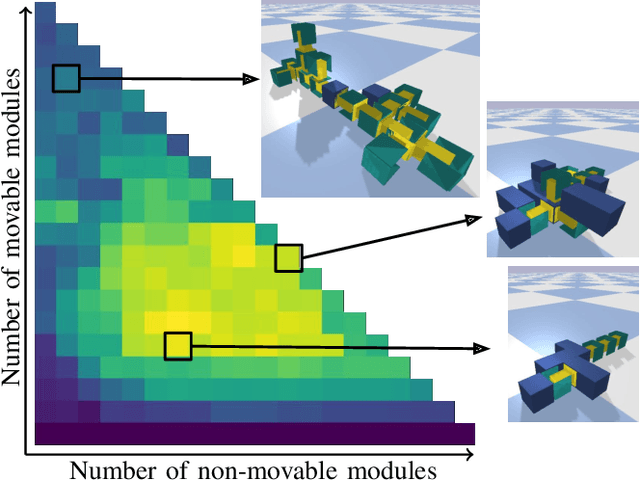
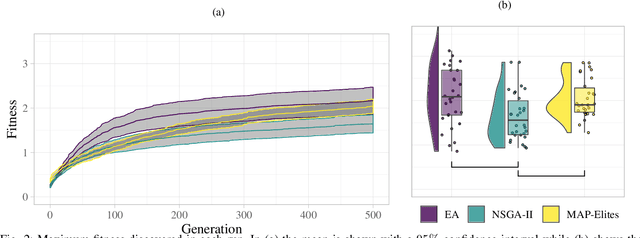
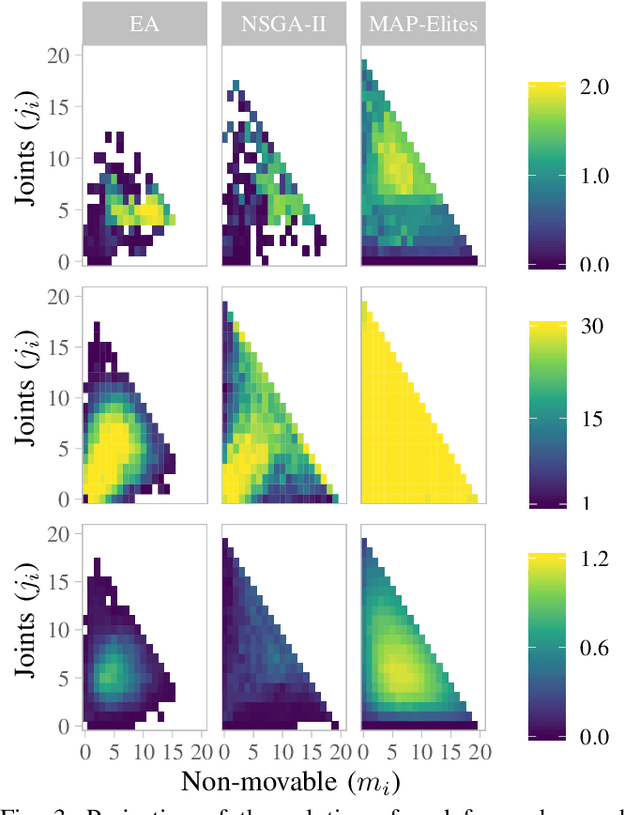
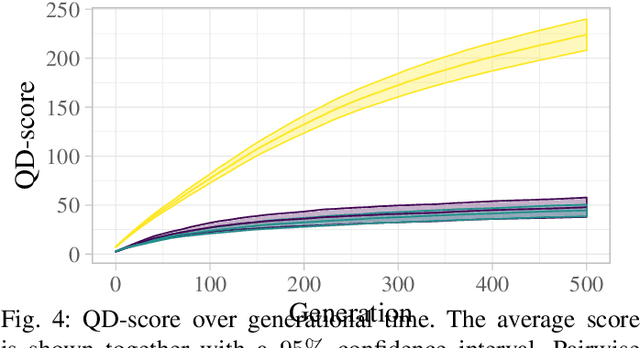
In Evolutionary Robotics a population of solutions is evolved to optimize robots that solve a given task. However, in traditional Evolutionary Algorithms, the population of solutions tends to converge to local optima when the problem is complex or the search space is large, a problem known as premature convergence. Quality Diversity algorithms try to overcome premature convergence by introducing additional measures that reward solutions for being different while not necessarily performing better. In this paper we compare a single objective Evolutionary Algorithm with two diversity promoting search algorithms; a Multi-Objective Evolutionary Algorithm and MAP-Elites a Quality Diversity algorithm, for the difficult problem of evolving control and morphology in modular robotics. We compare their ability to produce high performing solutions, in addition to analyze the evolved morphological diversity. The results show that all three search algorithms are capable of evolving high performing individuals. However, the Quality Diversity algorithm is better adept at filling all niches with high-performing solutions. This confirms that Quality Diversity algorithms are well suited for evolving modular robots and can be an important means of generating repertoires of high performing solutions that can be exploited both at design- and runtime.
On Restricting Real-Valued Genotypes in Evolutionary Algorithms
May 19, 2020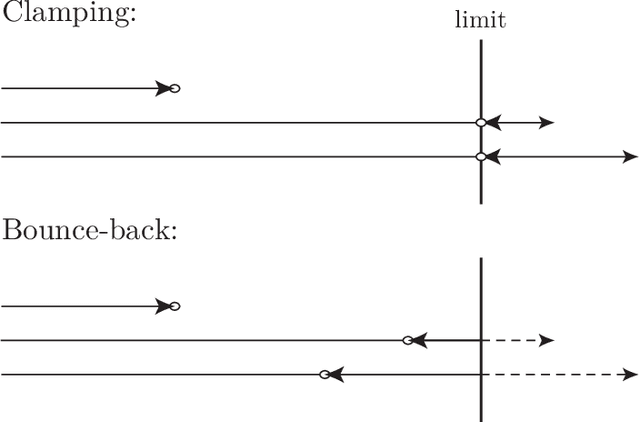
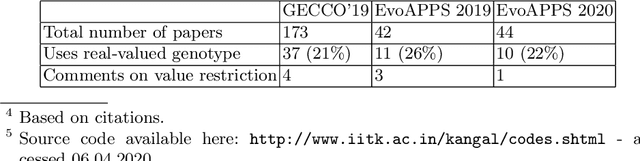
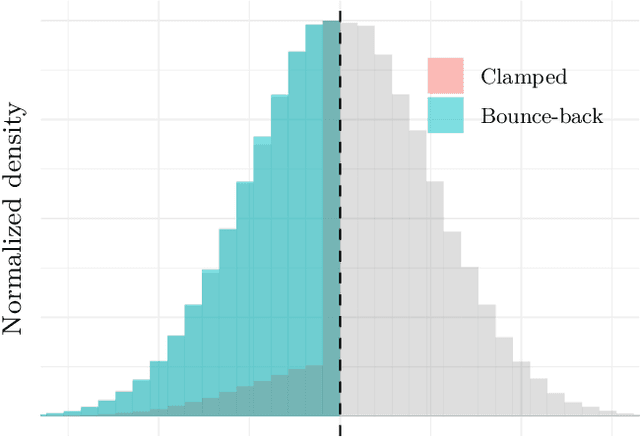
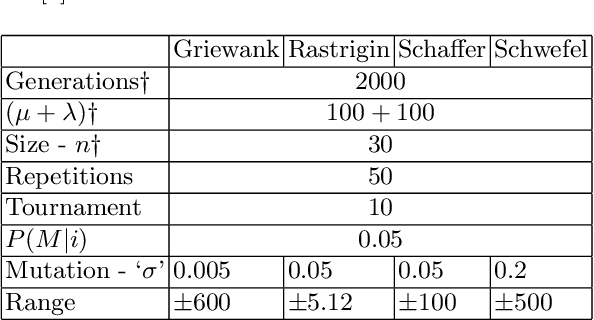
Real-valued genotypes together with the variation operators, mutation and crossover, constitute some of the fundamental building blocks of Evolutionary Algorithms. Real-valued genotypes are utilized in a broad range of contexts, from weights in Artificial Neural Networks to parameters in robot control systems. Shared between most uses of real-valued genomes is the need for limiting the range of individual parameters to allowable bounds. In this paper we will illustrate the challenge of limiting the parameters of real-valued genomes and analyse the most promising method to properly limit these values. We utilize both empirical as well as benchmark examples to demonstrate the utility of the proposed method and through a literature review show how the insight of this paper could impact other research within the field. The proposed method requires minimal intervention from Evolutionary Algorithm practitioners and behaves well under repeated application of variation operators, leading to better theoretical properties as well as significant differences in well-known benchmarks.
Lessons Learned from Real-World Experiments with DyRET: the Dynamic Robot for Embodied Testing
May 14, 2019
Robots are used in more and more complex environments, and are expected to be able to adapt to changes and unknown situations. The easiest and quickest way to adapt is to change the control system of the robot, but for increasingly complex environments one should also change the body of the robot -- its morphology -- to better fit the task at hand. The theory of Embodied Cognition states that control is not the only source of cognition, and the body, environment, interaction between these and the mind all contribute as cognitive resources. Taking advantage of these concepts could lead to improved adaptivity, robustness, and versatility, however, executing these concepts on real-world robots puts additional requirements on the hardware and has several challenges when compared to learning just control. In contrast to the majority of work in Evolutionary Robotics, Eiben argues for real-world experiments in his `Grand Challenges for Evolutionary Robotics'. This requires robust hardware platforms that are capable of repeated experiments which should at the same time be flexible when unforeseen demands arise. In this paper, we introduce our unique robot platform with self-adaptive morphology. We discuss the challenges we have faced when designing it, and the lessons learned from real-world testing and learning.
Evolved embodied phase coordination enables robust quadruped robot locomotion
Apr 11, 2019



Overcoming robotics challenges in the real world requires resilient control systems capable of handling a multitude of environments and unforeseen events. Evolutionary optimization using simulations is a promising way to automatically design such control systems, however, if the disparity between simulation and the real world becomes too large, the optimization process may result in dysfunctional real-world behaviors. In this paper, we address this challenge by considering embodied phase coordination in the evolutionary optimization of a quadruped robot controller based on central pattern generators. With this method, leg phases, and indirectly also inter-leg coordination, are influenced by sensor feedback.By comparing two very similar control systems we gain insight into how the sensory feedback approach affects the evolved parameters of the control system, and how the performances differs in simulation, in transferal to the real world, and to different real-world environments. We show that evolution enables the design of a control system with embodied phase coordination which is more complex than previously seen approaches, and that this system is capable of controlling a real-world multi-jointed quadruped robot.The approach reduces the performance discrepancy between simulation and the real world, and displays robustness towards new environments.
* 9 pages