 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Restricting Real-Valued Genotypes in Evolutionary Algorithms
May 19, 2020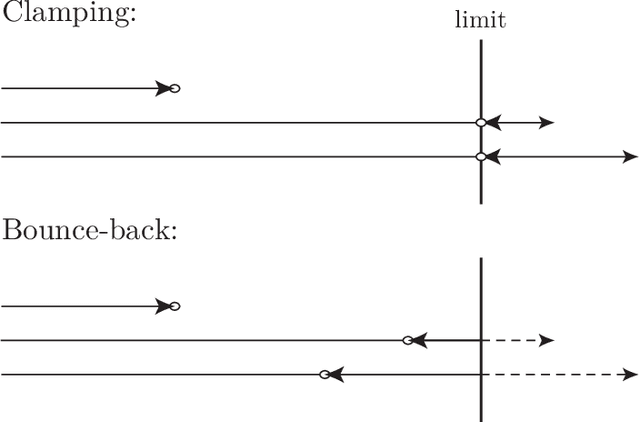
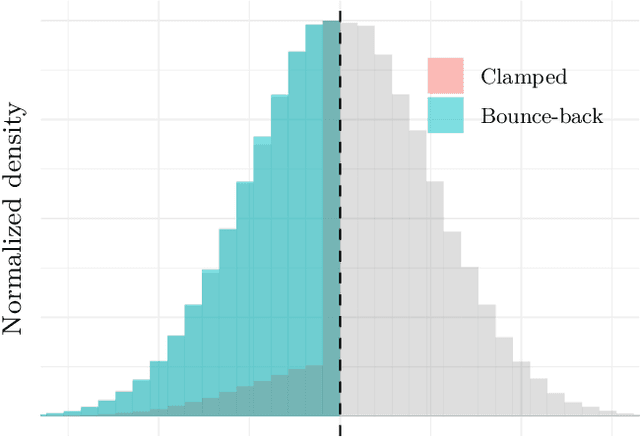
Real-valued genotypes together with the variation operators, mutation and crossover, constitute some of the fundamental building blocks of Evolutionary Algorithms. Real-valued genotypes are utilized in a broad range of contexts, from weights in Artificial Neural Networks to parameters in robot control systems. Shared between most uses of real-valued genomes is the need for limiting the range of individual parameters to allowable bounds. In this paper we will illustrate the challenge of limiting the parameters of real-valued genomes and analyse the most promising method to properly limit these values. We utilize both empirical as well as benchmark examples to demonstrate the utility of the proposed method and through a literature review show how the insight of this paper could impact other research within the field. The proposed method requires minimal intervention from Evolutionary Algorithm practitioners and behaves well under repeated application of variation operators, leading to better theoretical properties as well as significant differences in well-known benchmarks.
Evolving Robots on Easy Mode: Towards a Variable Complexity Controller for Quadrupeds
Feb 12, 2019



The complexity of a legged robot's environment or task can inform how specialised its gait must be to ensure success. Evolving specialised robotic gaits demands many evaluations - acceptable for computer simulations, but not for physical robots. For some tasks, a more general gait, with lower optimization costs, could be satisfactory. In this paper, we introduce a new type of gait controller where complexity can be set by a single parameter, using a dynamic genotype-phenotype mapping. Low controller complexity leads to conservative gaits, while higher complexity allows more sophistication and high performance for demanding tasks, at the cost of optimization effort. We investigate the new controller on a virtual robot in simulations and do preliminary testing on a real-world robot. We show that having variable complexity allows us to adapt to different optimization budgets. With a high evaluation budget in simulation, a complex controller performs best. Moreover, real-world evolution with a limited evaluation budget indicates that a lower gait complexity is preferable for a relatively simple environment.