 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Restricting Real-Valued Genotypes in Evolutionary Algorithms
May 19, 2020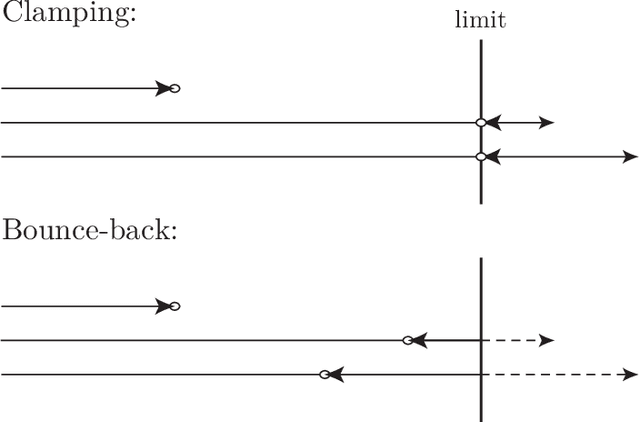
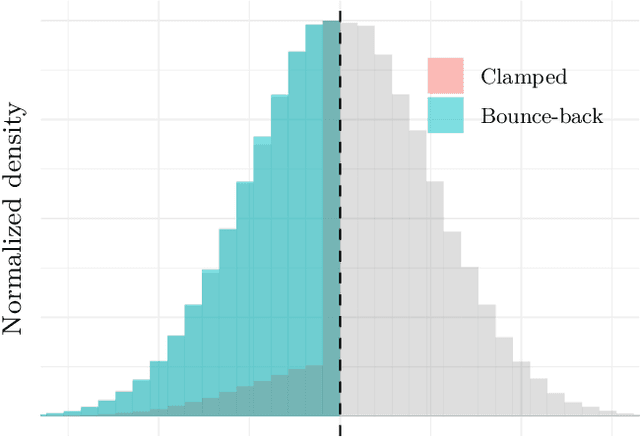
Real-valued genotypes together with the variation operators, mutation and crossover, constitute some of the fundamental building blocks of Evolutionary Algorithms. Real-valued genotypes are utilized in a broad range of contexts, from weights in Artificial Neural Networks to parameters in robot control systems. Shared between most uses of real-valued genomes is the need for limiting the range of individual parameters to allowable bounds. In this paper we will illustrate the challenge of limiting the parameters of real-valued genomes and analyse the most promising method to properly limit these values. We utilize both empirical as well as benchmark examples to demonstrate the utility of the proposed method and through a literature review show how the insight of this paper could impact other research within the field. The proposed method requires minimal intervention from Evolutionary Algorithm practitioners and behaves well under repeated application of variation operators, leading to better theoretical properties as well as significant differences in well-known benchmarks.
Multi-objective Analysis of MAP-Elites Performance
Jun 07, 2018

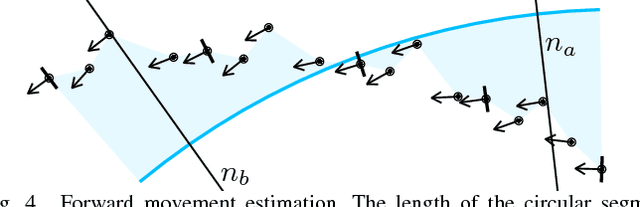
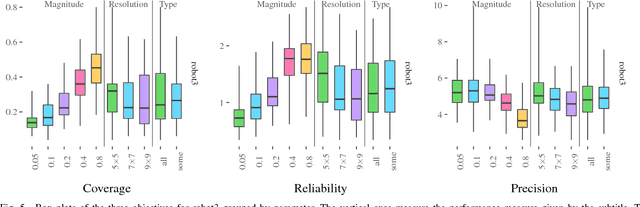
In certain complex optimization tasks, it becomes necessary to use multiple measures to characterize the performance of different algorithms. This paper presents a method that combines ordinal effect sizes with Pareto dominance to analyze such cases. Since the method is ordinal, it can also generalize across different optimization tasks even when the performance measurements are differently scaled. Through a case study, we show that this method can discover and quantify relations that would be difficult to deduce using a conventional measure-by-measure analysis. This case study applies the method to the evolution of robot controller repertoires using the MAP-Elites algorithm. Here, we analyze the search performance across a large set of parametrizations; varying mutation size and operator type, as well as map resolution, across four different robot morphologies. We show that the average magnitude of mutations has a bigger effect on outcomes than their precise distributions.
Real-World Evolution Adapts Robot Morphology and Control to Hardware Limitations
May 09, 2018



For robots to handle the numerous factors that can affect them in the real world, they must adapt to changes and unexpected events. Evolutionary robotics tries to solve some of these issues by automatically optimizing a robot for a specific environment. Most of the research in this field, however, uses simplified representations of the robotic system in software simulations. The large gap between performance in simulation and the real world makes it challenging to transfer the resulting robots to the real world. In this paper, we apply real world multi-objective evolutionary optimization to optimize both control and morphology of a four-legged mammal-inspired robot. We change the supply voltage of the system, reducing the available torque and speed of all joints, and study how this affects both the fitness, as well as the morphology and control of the solutions. In addition to demonstrating that this real-world evolutionary scheme for morphology and control is indeed feasible with relatively few evaluations, we show that evolution under the different hardware limitations results in comparable performance for low and moderate speeds, and that the search achieves this by adapting both the control and the morphology of the robot.