 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnvironmental Adaptation of Robot Morphology and Control through Real-world Evolution
Mar 30, 2020



Robots operating in the real world will experience a range of different environments and tasks. It is essential for the robot to have the ability to adapt to its surroundings to work efficiently in changing conditions. Evolutionary robotics aims to solve this by optimizing both the control and body (morphology) of a robot, allowing adaptation to internal, as well as external factors. Most work in this field has been done in physics simulators, which are relatively simple and not able to replicate the richness of interactions found in the real world. Solutions that rely on the complex interplay between control, body, and environment are therefore rarely found. In this paper, we rely solely on real-world evaluations and apply evolutionary search to yield combinations of morphology and control for our mechanically self-reconfiguring quadruped robot. We evolve solutions on two very different physical surfaces and analyze the results in terms of both control and morphology. We then transition to two previously unseen surfaces to demonstrate the generality of our method. We find that the evolutionary search adapts both control and body to the different physical environments, yielding significantly different morphology-controller configurations. Moreover, we observe that the solutions found by our method work well on previously unseen terrains.
Lessons Learned from Real-World Experiments with DyRET: the Dynamic Robot for Embodied Testing
May 14, 2019
Robots are used in more and more complex environments, and are expected to be able to adapt to changes and unknown situations. The easiest and quickest way to adapt is to change the control system of the robot, but for increasingly complex environments one should also change the body of the robot -- its morphology -- to better fit the task at hand. The theory of Embodied Cognition states that control is not the only source of cognition, and the body, environment, interaction between these and the mind all contribute as cognitive resources. Taking advantage of these concepts could lead to improved adaptivity, robustness, and versatility, however, executing these concepts on real-world robots puts additional requirements on the hardware and has several challenges when compared to learning just control. In contrast to the majority of work in Evolutionary Robotics, Eiben argues for real-world experiments in his `Grand Challenges for Evolutionary Robotics'. This requires robust hardware platforms that are capable of repeated experiments which should at the same time be flexible when unforeseen demands arise. In this paper, we introduce our unique robot platform with self-adaptive morphology. We discuss the challenges we have faced when designing it, and the lessons learned from real-world testing and learning.
Self-Modifying Morphology Experiments with DyRET: Dynamic Robot for Embodied Testing
Mar 12, 2019



If robots are to become ubiquitous, they will need to be able to adapt to complex and dynamic environments. Robots that can adapt their bodies while deployed might be flexible and robust enough to meet this challenge. Previous work on dynamic robot morphology has focused on simulation, combining simple modules, or switching between locomotion modes. Here, we present an alternative approach: a self-reconfigurable morphology that allows a single four-legged robot to actively adapt the length of its legs to different environments. We report the design of our robot, as well as the results of a study that verifies the performance impact of self-reconfiguration. This study compares three different control and morphology pairs under different levels of servo supply voltage in the lab. We also performed preliminary tests in different uncontrolled outdoor environments to see if changes to the external environment supports our findings in the lab. Our results show better performance with an adaptable body, lending evidence to the value of self-reconfiguration for quadruped robots.
Deep Predictive Models in Interactive Music
Jun 01, 2018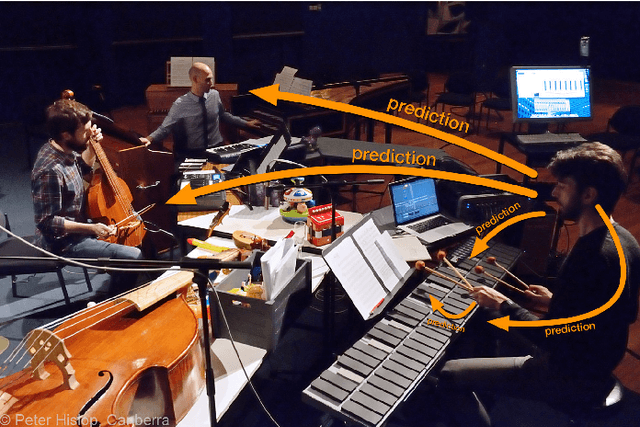
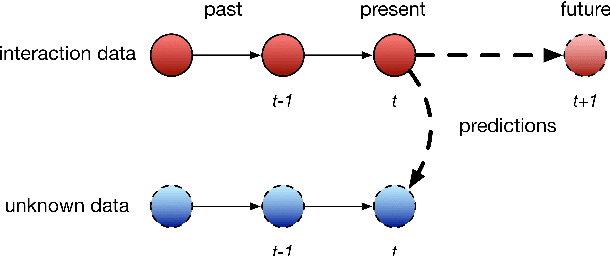

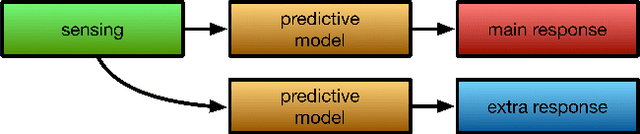
Musical performance requires prediction to operate instruments, to perform in groups and to improvise. We argue, with reference to a number of digital music instruments (DMIs), including two of our own, that predictive machine learning models can help interactive systems to understand their temporal context and ensemble behaviour. We also discuss how recent advances in deep learning highlight the role of prediction in DMIs, by allowing data-driven predictive models with a long memory of past states. We advocate for predictive musical interaction, where a predictive model is embedded in a musical interface, assisting users by predicting unknown states of musical processes. We propose a framework for characterising prediction as relating to the instrumental sound, ongoing musical process, or between members of an ensemble. Our framework shows that different musical interface design configurations lead to different types of prediction. We show that our framework accommodates deep generative models, as well as models for predicting gestural states, or other high-level musical information. We apply our framework to examples from our recent work and the literature, and discuss the benefits and challenges revealed by these systems as well as musical use-cases where prediction is a necessary component.
Real-World Evolution Adapts Robot Morphology and Control to Hardware Limitations
May 09, 2018



For robots to handle the numerous factors that can affect them in the real world, they must adapt to changes and unexpected events. Evolutionary robotics tries to solve some of these issues by automatically optimizing a robot for a specific environment. Most of the research in this field, however, uses simplified representations of the robotic system in software simulations. The large gap between performance in simulation and the real world makes it challenging to transfer the resulting robots to the real world. In this paper, we apply real world multi-objective evolutionary optimization to optimize both control and morphology of a four-legged mammal-inspired robot. We change the supply voltage of the system, reducing the available torque and speed of all joints, and study how this affects both the fitness, as well as the morphology and control of the solutions. In addition to demonstrating that this real-world evolutionary scheme for morphology and control is indeed feasible with relatively few evaluations, we show that evolution under the different hardware limitations results in comparable performance for low and moderate speeds, and that the search achieves this by adapting both the control and the morphology of the robot.
Exploring Mechanically Self-Reconfiguring Robots for Autonomous Design
May 08, 2018



Evolutionary robotics has aimed to optimize robot control and morphology to produce better and more robust robots. Most previous research only addresses optimization of control, and does this only in simulation. We have developed a four-legged mammal-inspired robot that features a self-reconfiguring morphology. In this paper, we discuss the possibilities opened up by being able to efficiently do experiments on a changing morphology in the real world. We discuss present challenges for such a platform and potential experimental designs that could unlock new discoveries. Finally, we place our robot in its context within general developments in the field of evolutionary robotics, and consider what advances the future might hold.
RoboJam: A Musical Mixture Density Network for Collaborative Touchscreen Interaction
Nov 29, 2017

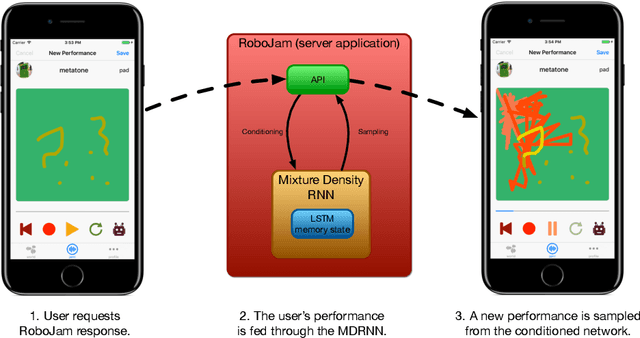
RoboJam is a machine-learning system for generating music that assists users of a touchscreen music app by performing responses to their short improvisations. This system uses a recurrent artificial neural network to generate sequences of touchscreen interactions and absolute timings, rather than high-level musical notes. To accomplish this, RoboJam's network uses a mixture density layer to predict appropriate touch interaction locations in space and time. In this paper, we describe the design and implementation of RoboJam's network and how it has been integrated into a touchscreen music app. A preliminary evaluation analyses the system in terms of training, musical generation and user interaction.