 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvolution of linkages for prototyping of linkage based robots
May 02, 2023Prototyping robotic systems is a time consuming process. Computer aided design, however, might speed up the process significantly. Quality-diversity evolutionary approaches optimise for novelty as well as performance, and can be used to generate a repertoire of diverse designs. This design repertoire could be used as a tool to guide a designer and kick-start the rapid prototyping process. This paper explores this idea in the context of mechanical linkage based robots. These robots can be a good test-bed for rapid prototyping, as they can be modified quickly for swift iterations in design. We compare three evolutionary algorithms for optimising 2D mechanical linkages: 1) a standard evolutionary algorithm, 2) the multi-objective algorithm NSGA-II, and 3) the quality-diversity algorithm MAP-Elites. Some of the found linkages are then realized on a physical hexapod robot through a prototyping process, and tested on two different floors. We find that all the tested approaches, except the standard evolutionary algorithm, are capable of finding mechanical linkages that creates a path similar to a specified desired path. However, the quality-diversity approaches that had the length of the linkage as a behaviour descriptor were the most useful when prototyping. This was due to the quality-diversity approaches having a larger variety of similar designs to choose from, and because the search could be constrained by the behaviour descriptors to make linkages that were viable for construction on our hexapod platform.
Ankle Joints Are Beneficial When Optimizing Supported Real-world Bipedal Robot Gaits
May 22, 2021
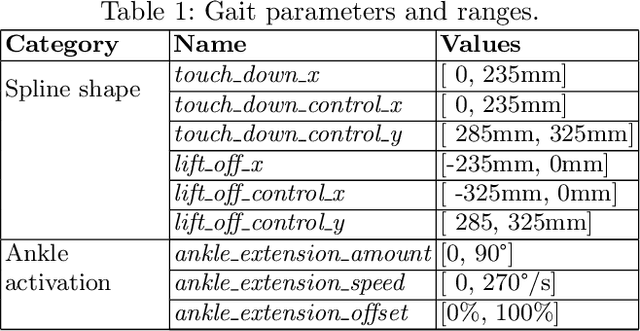
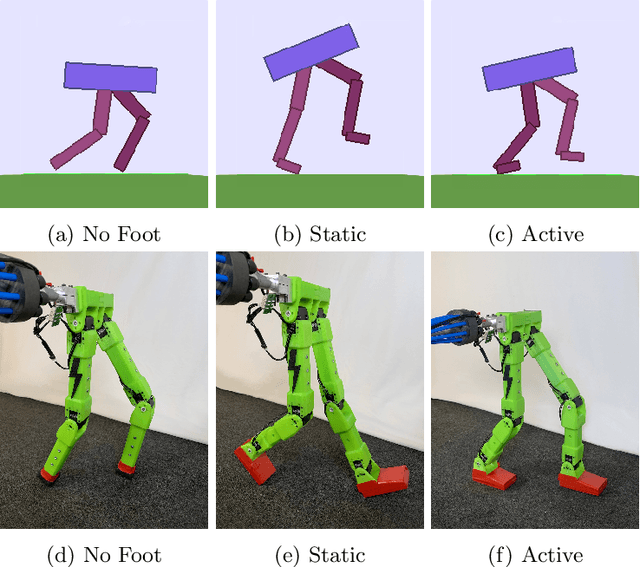
Legged robots promise higher versatility and the ability to traverse much more difficult terrains than their wheeled counterparts. Even though the use of legged robots have increased drastically in the last few years, they are still not close to the performance seen from legged animals in nature. Robotic legs are typically fairly simple mechanically, and few feature an ankle joint, even though most land mammals have one. The ankle could be a key to better performance and stability for legged robots, and in this paper we investigate how the use of an ankle in a bipedal robot could improve its performance when combined with evolutionary techniques for gait optimization. Our study shows, both in simulation and physical experiments, that the addition of an ankle joint results in greater walking speeds for a supported bipedal robot.
Semi-supervised Gated Recurrent Neural Networks for Robotic Terrain Classification
Nov 24, 2020

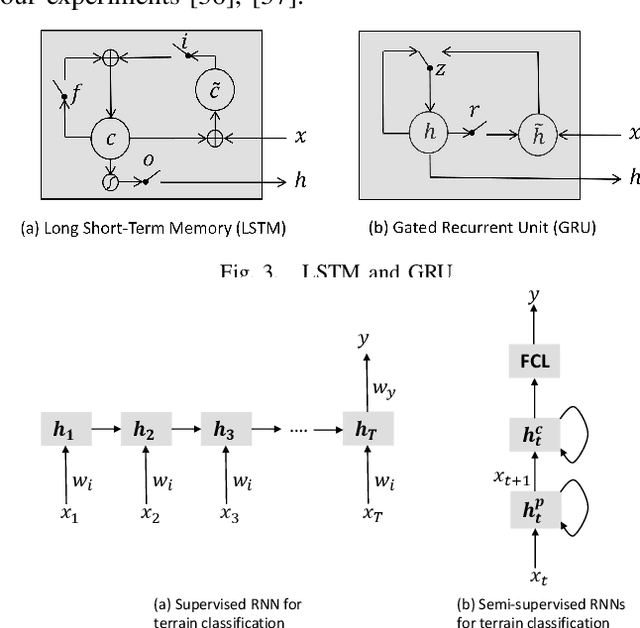
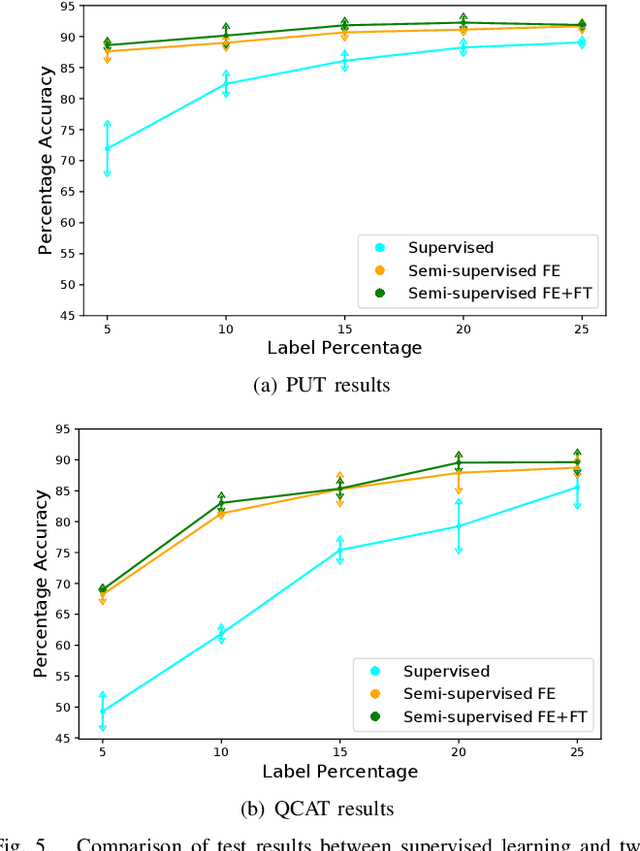
Legged robots are popular candidates for missions in challenging terrains due to the wide variety of locomotion strategies they can employ. Terrain classification is a key enabling technology for autonomous legged robots, as it allows the robot to harness their innate flexibility to adapt their behaviour to the demands of their operating environment. In this paper, we show how highly capable machine learning techniques, namely gated recurrent neural networks, allow our target legged robot to correctly classify the terrain it traverses in both supervised and semi-supervised fashions. Tests on a benchmark data set shows that our time-domain classifiers are well capable of dealing with raw and variable-length data with small amount of labels and perform to a level far exceeding the frequency-domain classifiers. The classification results on our own extended data set opens up a range of high-performance behaviours that are specific to those environments. Furthermore, we show how raw unlabelled data is used to improve significantly the classification results in a semi-supervised model.