 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Compliant Robotic Leg Based on Fibre Jamming
Aug 03, 2023



Humans possess a remarkable ability to react to sudden and unpredictable perturbations through immediate mechanical responses, which harness the visco-elastic properties of muscles to perform auto-corrective movements to maintain balance. In this paper, we propose a novel design of a robotic leg inspired by this mechanism. We develop multi-material fibre jammed tendons, and demonstrate their use as passive compliant mechanisms to achieve variable joint stiffness and improve stability. Through numerical simulations and extensive experimentation, we demonstrate the ability for our system to achieve a wide range of potentially beneficial compliance regimes. We show the role and contribution of each tendon quantitatively by evaluating their individual force contribution in resisting rotational perturbations. We also perform walking experiments with programmed bioinspired gaits that varying the stiffness of the tendons throughout the gait cycle, demonstrating a stable and consistent behaviour. We show the potential of such systems when integrated into legged robots, where compliance and shock absorption can be provided entirely through the morphological properties of the leg.
Collaborative Ground-Aerial Multi-Robot System for Disaster Response Missions with a Low-Cost Drone Add-On for Off-the-Shelf Drones
Apr 14, 2023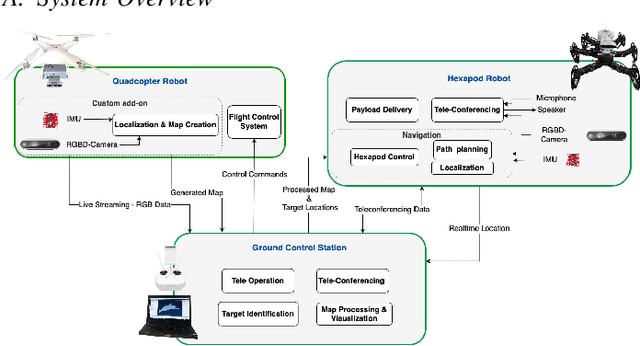

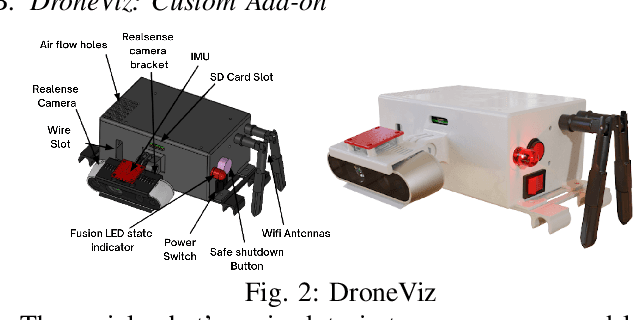
In disaster-stricken environments, it's vital to assess the damage quickly, analyse the stability of the environment, and allocate resources to the most vulnerable areas where victims might be present. These missions are difficult and dangerous to be conducted directly by humans. Using the complementary capabilities of both the ground and aerial robots, we investigate a collaborative approach of aerial and ground robots to address this problem. With an increased field of view, faster speed, and compact size, the aerial robot explores the area and creates a 3D feature-based map graph of the environment while providing a live video stream to the ground control station. Once the aerial robot finishes the exploration run, the ground control station processes the map and sends it to the ground robot. The ground robot, with its higher operation time, static stability, payload delivery and tele-conference capabilities, can then autonomously navigate to identified high-vulnerability locations. We have conducted experiments using a quadcopter and a hexapod robot in an indoor modelled environment with obstacles and uneven ground. Additionally, we have developed a low-cost drone add-on with value-added capabilities, such as victim detection, that can be attached to an off-the-shelf drone. The system was assessed for cost-effectiveness, energy efficiency, and scalability.
Heterogeneous robot teams with unified perception and autonomy: How Team CSIRO Data61 tied for the top score at the DARPA Subterranean Challenge
Feb 26, 2023



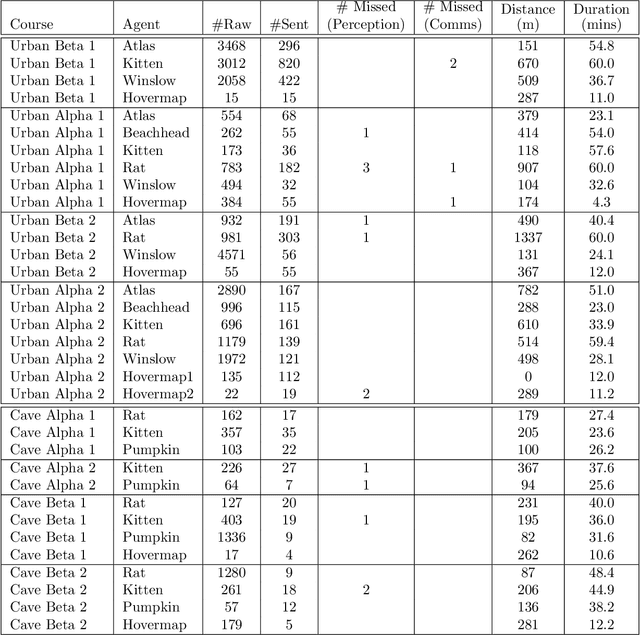
The DARPA Subterranean Challenge was designed for competitors to develop and deploy teams of autonomous robots to explore difficult unknown underground environments. Categorised in to human-made tunnels, underground urban infrastructure and natural caves, each of these subdomains had many challenging elements for robot perception, locomotion, navigation and autonomy. These included degraded wireless communication, poor visibility due to smoke, narrow passages and doorways, clutter, uneven ground, slippery and loose terrain, stairs, ledges, overhangs, dripping water, and dynamic obstacles that move to block paths among others. In the Final Event of this challenge held in September 2021, the course consisted of all three subdomains. The task was for the robot team to perform a scavenger hunt for a number of pre-defined artefacts within a limited time frame. Only one human supervisor was allowed to communicate with the robots once they were in the course. Points were scored when accurate detections and their locations were communicated back to the scoring server. A total of 8 teams competed in the finals held at the Mega Cavern in Louisville, KY, USA. This article describes the systems deployed by Team CSIRO Data61 that tied for the top score and won second place at the event.
Human-Robot Team Performance Compared to Full Robot Autonomy in 16 Real-World Search and Rescue Missions: Adaptation of the DARPA Subterranean Challenge
Dec 11, 2022
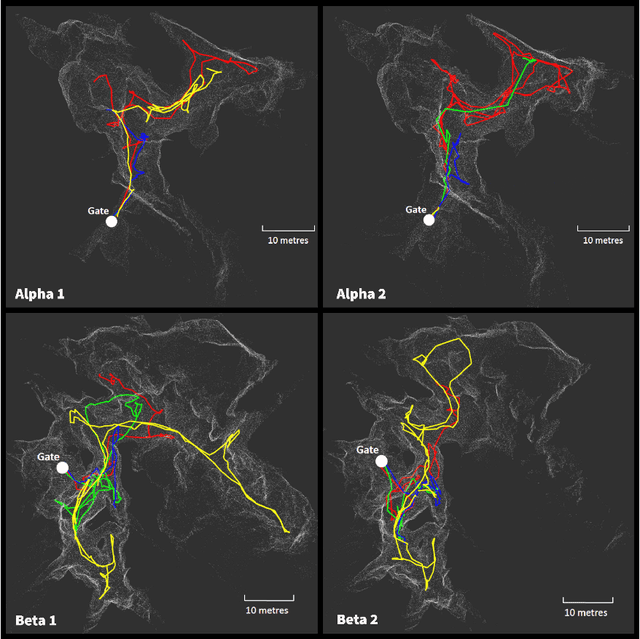
Human operators in human-robot teams are commonly perceived to be critical for mission success. To explore the direct and perceived impact of operator input on task success and team performance, 16 real-world missions (10 hrs) were conducted based on the DARPA Subterranean Challenge. These missions were to deploy a heterogeneous team of robots for a search task to locate and identify artifacts such as climbing rope, drills and mannequins representing human survivors. Two conditions were evaluated: human operators that could control the robot team with state-of-the-art autonomy (Human-Robot Team) compared to autonomous missions without human operator input (Robot-Autonomy). Human-Robot Teams were often in directed autonomy mode (70% of mission time), found more items, traversed more distance, covered more unique ground, and had a higher time between safety-related events. Human-Robot Teams were faster at finding the first artifact, but slower to respond to information from the robot team. In routine conditions, scores were comparable for artifacts, distance, and coverage. Reasons for intervention included creating waypoints to prioritise high-yield areas, and to navigate through error-prone spaces. After observing robot autonomy, operators reported increases in robot competency and trust, but that robot behaviour was not always transparent and understandable, even after high mission performance.
Present and Future of SLAM in Extreme Underground Environments
Aug 02, 2022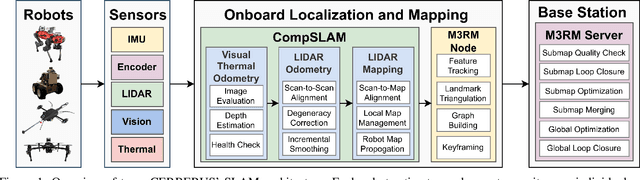
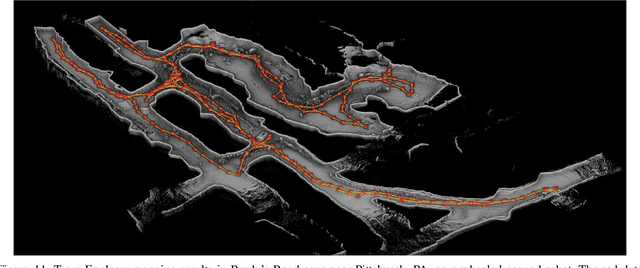
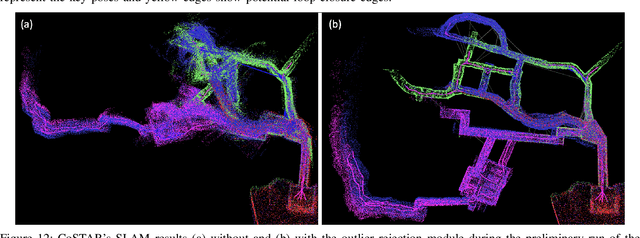
This paper reports on the state of the art in underground SLAM by discussing different SLAM strategies and results across six teams that participated in the three-year-long SubT competition. In particular, the paper has four main goals. First, we review the algorithms, architectures, and systems adopted by the teams; particular emphasis is put on lidar-centric SLAM solutions (the go-to approach for virtually all teams in the competition), heterogeneous multi-robot operation (including both aerial and ground robots), and real-world underground operation (from the presence of obscurants to the need to handle tight computational constraints). We do not shy away from discussing the dirty details behind the different SubT SLAM systems, which are often omitted from technical papers. Second, we discuss the maturity of the field by highlighting what is possible with the current SLAM systems and what we believe is within reach with some good systems engineering. Third, we outline what we believe are fundamental open problems, that are likely to require further research to break through. Finally, we provide a list of open-source SLAM implementations and datasets that have been produced during the SubT challenge and related efforts, and constitute a useful resource for researchers and practitioners.
Wildcat: Online Continuous-Time 3D Lidar-Inertial SLAM
May 25, 2022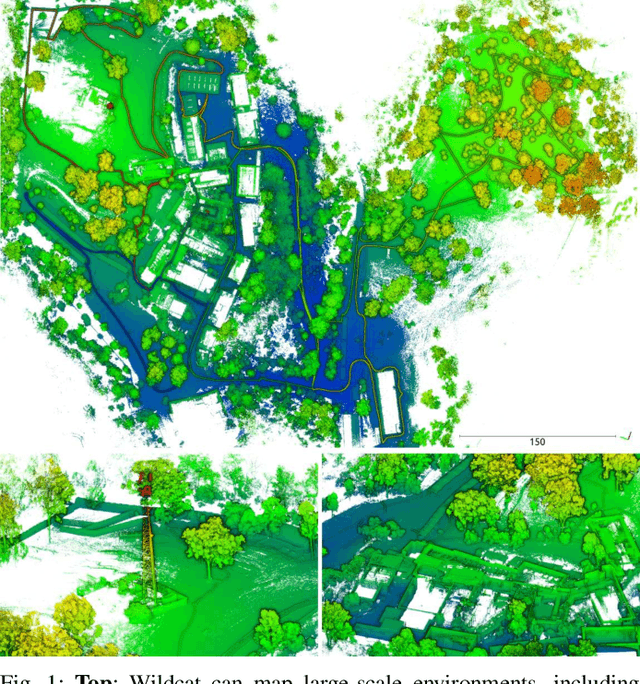
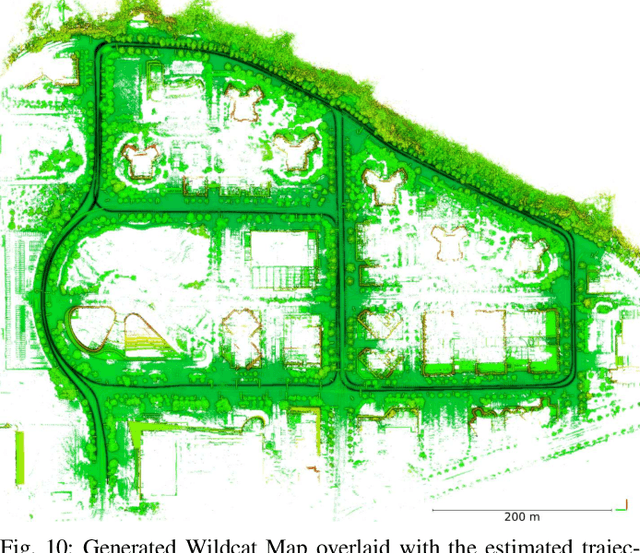
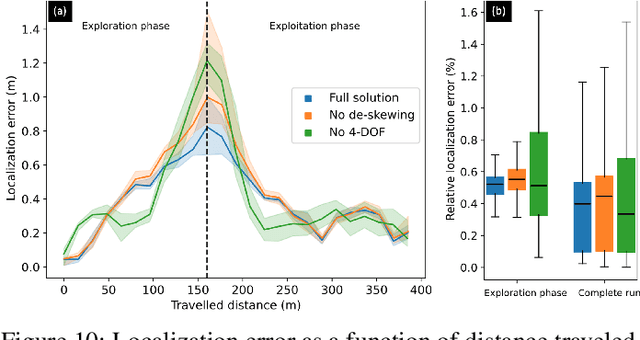
We present Wildcat, a novel online 3D lidar-inertial SLAM system with exceptional versatility and robustness. At its core, Wildcat combines a robust real-time lidar-inertial odometry module, utilising a continuous-time trajectory representation, with an efficient pose-graph optimisation module that seamlessly supports both the single- and multi-agent settings. The robustness of Wildcat was recently demonstrated in the DARPA Subterranean Challenge where it outperformed other SLAM systems across various types of sensing-degraded and perceptually challenging environments. In this paper, we extensively evaluate Wildcat in a diverse set of new and publicly available real-world datasets and showcase its superior robustness and versatility over two existing state-of-the-art lidar-inertial SLAM systems.
Heterogeneous Ground and Air Platforms, Homogeneous Sensing: Team CSIRO Data61's Approach to the DARPA Subterranean Challenge
Apr 19, 2021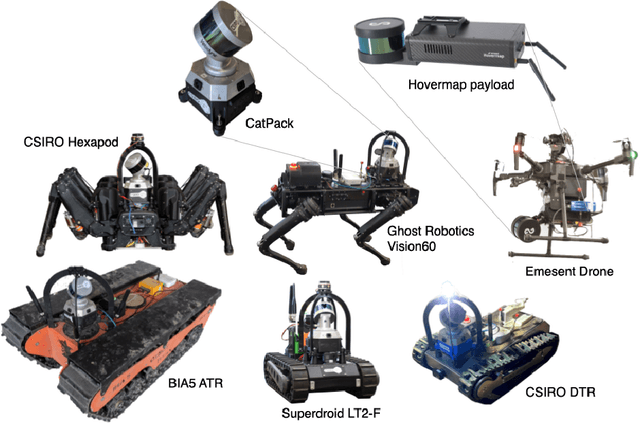
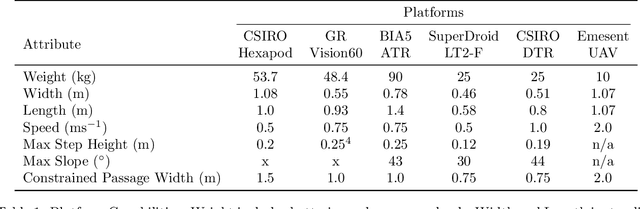
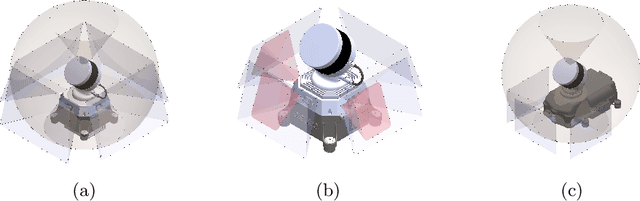
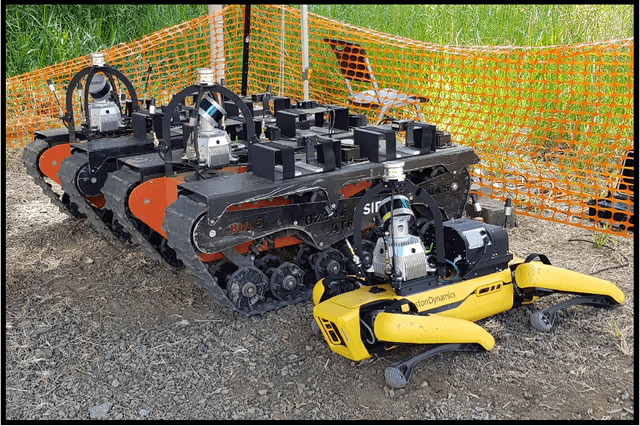
Heterogeneous teams of robots, leveraging a balance between autonomy and human interaction, bring powerful capabilities to the problem of exploring dangerous, unstructured subterranean environments. Here we describe the solution developed by Team CSIRO Data61, consisting of CSIRO, Emesent and Georgia Tech, during the DARPA Subterranean Challenge. These presented systems were fielded in the Tunnel Circuit in August 2019, the Urban Circuit in February 2020, and in our own Cave event, conducted in September 2020. A unique capability of the fielded team is the homogeneous sensing of the platforms utilised, which is leveraged to obtain a decentralised multi-agent SLAM solution on each platform (both ground agents and UAVs) using peer-to-peer communications. This enabled a shift in focus from constructing a pervasive communications network to relying on multi-agent autonomy, motivated by experiences in early circuit events. These experiences also showed the surprising capability of rugged tracked platforms for challenging terrain, which in turn led to the heterogeneous team structure based on a BIA5 OzBot Titan ground robot and an Emesent Hovermap UAV, supplemented by smaller tracked or legged ground robots. The ground agents use a common CatPack perception module, which allowed reuse of the perception and autonomy stack across all ground agents with minimal adaptation.
Semi-supervised Gated Recurrent Neural Networks for Robotic Terrain Classification
Nov 24, 2020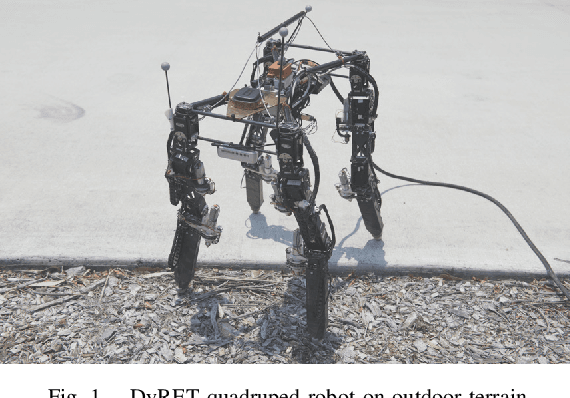

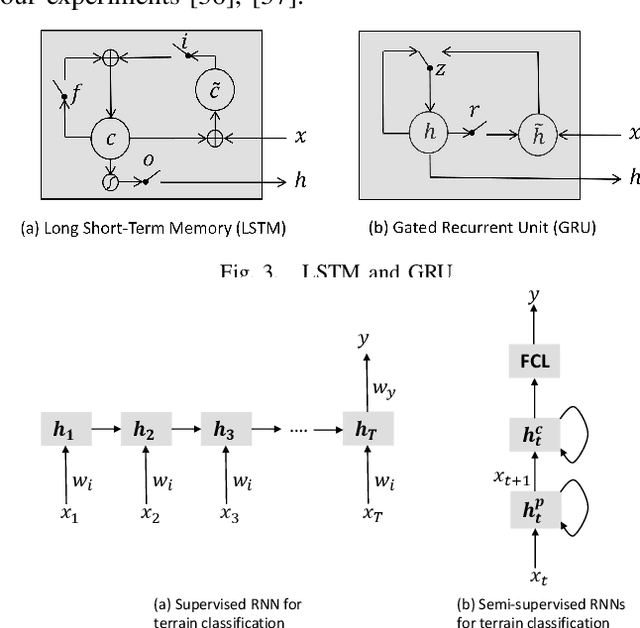
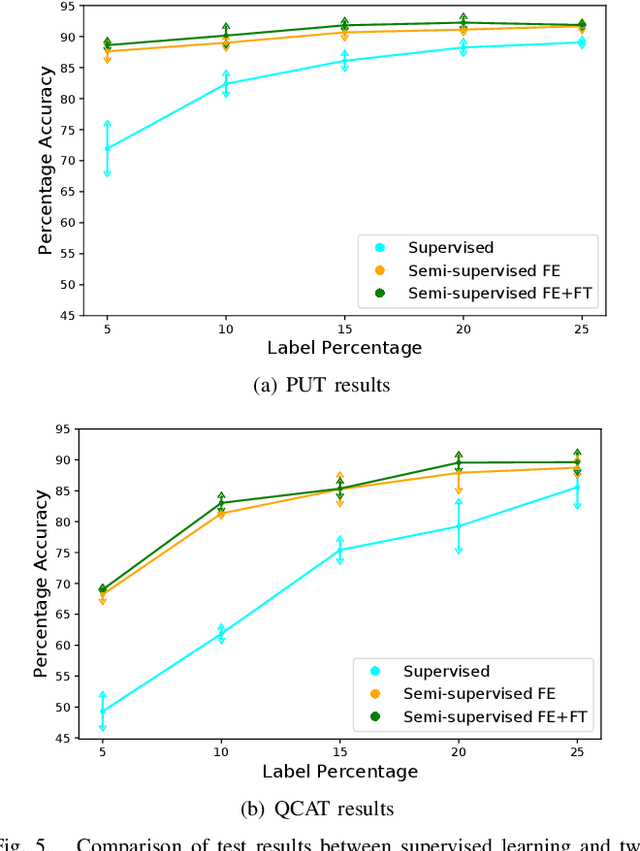
Legged robots are popular candidates for missions in challenging terrains due to the wide variety of locomotion strategies they can employ. Terrain classification is a key enabling technology for autonomous legged robots, as it allows the robot to harness their innate flexibility to adapt their behaviour to the demands of their operating environment. In this paper, we show how highly capable machine learning techniques, namely gated recurrent neural networks, allow our target legged robot to correctly classify the terrain it traverses in both supervised and semi-supervised fashions. Tests on a benchmark data set shows that our time-domain classifiers are well capable of dealing with raw and variable-length data with small amount of labels and perform to a level far exceeding the frequency-domain classifiers. The classification results on our own extended data set opens up a range of high-performance behaviours that are specific to those environments. Furthermore, we show how raw unlabelled data is used to improve significantly the classification results in a semi-supervised model.
Autonomous Obstacle Legipulation with a Hexapod Robot
Nov 12, 2020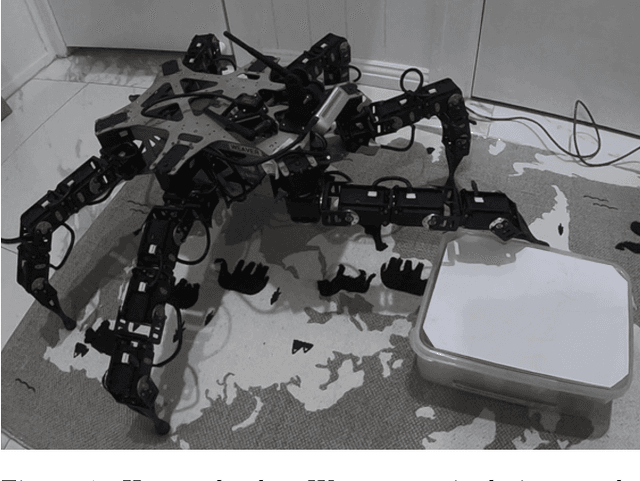


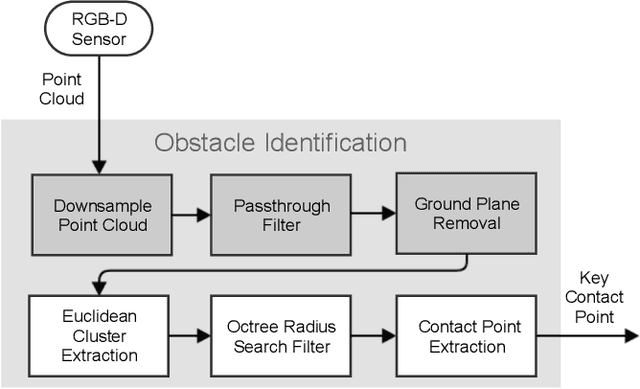
Legged robots traversing in confined environments could find their only path is blocked by obstacles. In circumstances where the obstacles are movable, a multilegged robot can manipulate the obstacles using its legs to allow it to continue on its path. We present a method for a hexapod robot to autonomously generate manipulation trajectories for detected obstacles. Using a RGB-D sensor as input, the obstacle is extracted from the environment and filtered to provide key contact points for the manipulation algorithm to calculate a trajectory to move the obstacle out of the path. Experiments on a 30 degree of freedom hexapod robot show the effectiveness of the algorithm in manipulating a range of obstacles in a 3D environment using its front legs.
Accessible Torque Bandwidth of a Series Elastic Actuator Considering the Thermodynamic Limitations
Nov 12, 2020
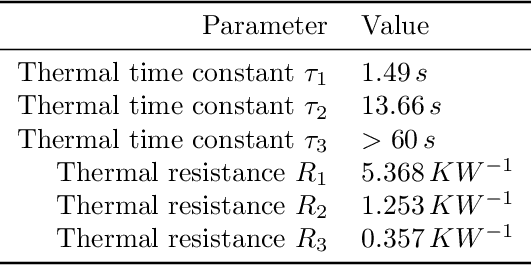
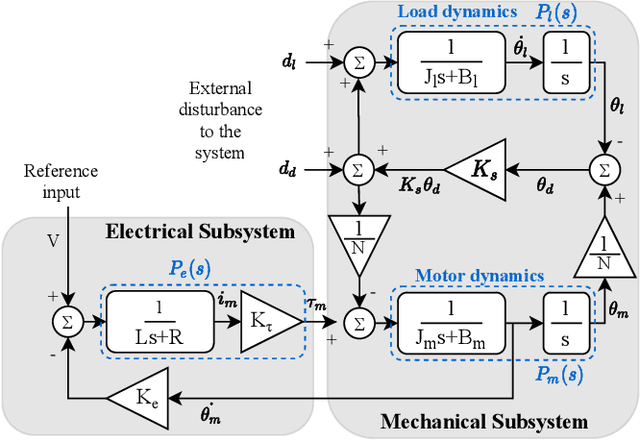
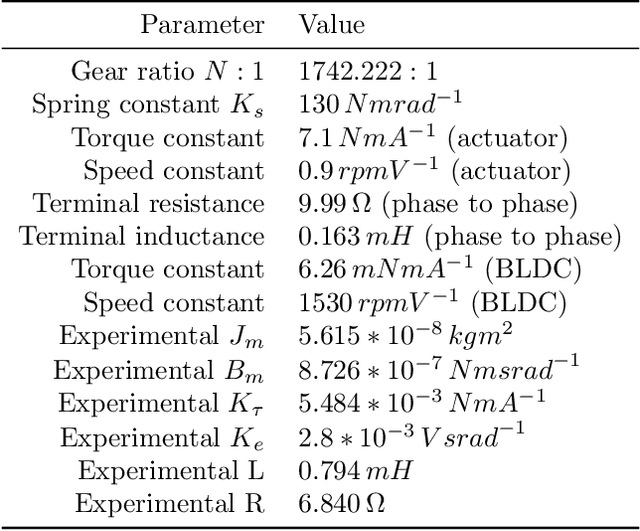
Within the scope of the paper, electromechanical and thermodynamic models are derived for a series elastic actuator and open loop and closed loop torque bandwidth parameters are analysed considering the thermodynamic behaviour of the actuator. It was observed that the closed loop torque bandwidth of the electromechanical subsystem of the actuator was not accessible in the entire torque reference amplitude range due to thermodynamic limitations. Therefore, a stator winding temperature estimation based adaptive controller is utilised and analysed to improve the accessibility of the controller based torque bandwidth. This paper implements the methodology on a HEBI Robotics X5-9 actuator as a case study.