Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccessible Torque Bandwidth of a Series Elastic Actuator Considering the Thermodynamic Limitations
Paper and Code
Nov 12, 2020
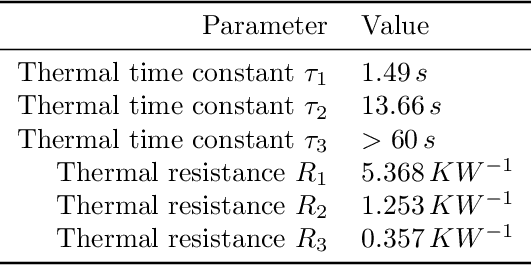
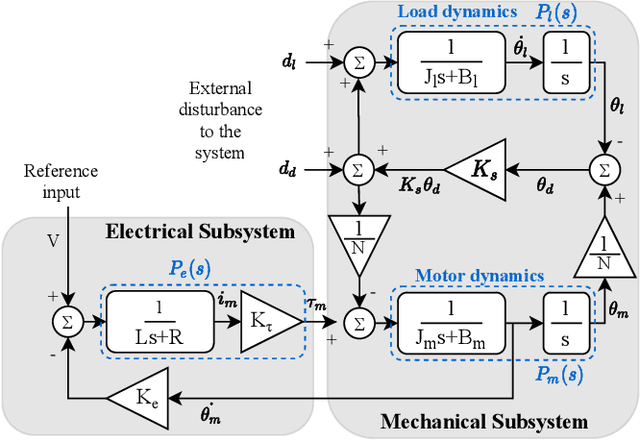
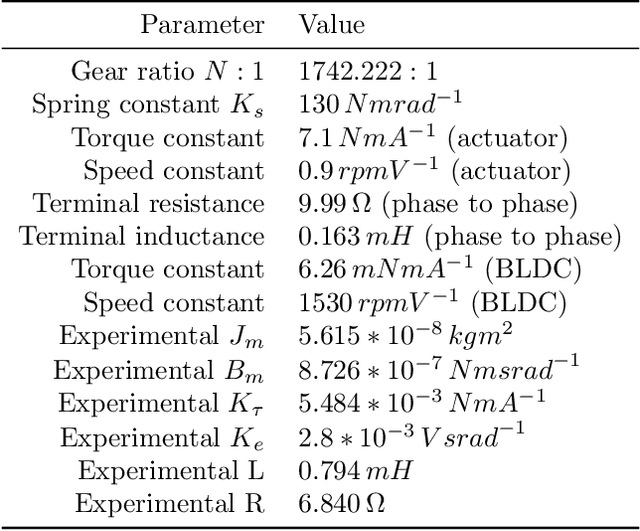
Within the scope of the paper, electromechanical and thermodynamic models are derived for a series elastic actuator and open loop and closed loop torque bandwidth parameters are analysed considering the thermodynamic behaviour of the actuator. It was observed that the closed loop torque bandwidth of the electromechanical subsystem of the actuator was not accessible in the entire torque reference amplitude range due to thermodynamic limitations. Therefore, a stator winding temperature estimation based adaptive controller is utilised and analysed to improve the accessibility of the controller based torque bandwidth. This paper implements the methodology on a HEBI Robotics X5-9 actuator as a case study.
* 10 pages, In proceedings of ACRA2020
View paper on