 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrivPRISM: Automatically Detecting Discrepancies Between Google Play Data Safety Declarations and Developer Privacy Policies
Mar 10, 2026End-users seldom read verbose privacy policies, leading app stores like Google Play to mandate simplified data safety declarations as a user-friendly alternative. However, these self-declared disclosures often contradict the full privacy policies, deceiving users about actual data practices and violating regulatory requirements for consistency. To address this, we introduce PrivPRISM, a robust framework that combines encoder and decoder language models to systematically extract and compare fine-grained data practices from privacy policies and to compare against data safety declarations, enabling scalable detection of non-compliance. Evaluating 7,770 popular mobile games uncovers discrepancies in nearly 53% of cases, rising to 61% among 1,711 widely used generic apps. Additionally, static code analysis reveals possible under-disclosures, with privacy policies disclosing just 66.8% of potential accesses to sensitive data like location and financial information, versus only 36.4% in data safety declarations of mobile games. Our findings expose systemic issues, including widespread reuse of generic privacy policies, vague / contradictory statements, and hidden risks in high-profile apps with 100M+ downloads, underscoring the urgent need for automated enforcement to protect platform integrity and for end-users to be vigilant about sensitive data they disclose via popular apps.
Entailment-Driven Privacy Policy Classification with LLMs
Sep 25, 2024

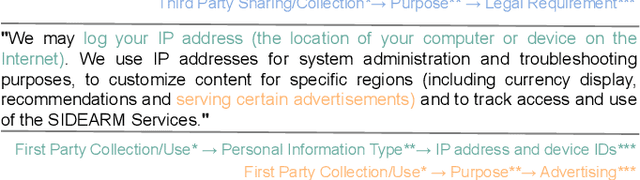

While many online services provide privacy policies for end users to read and understand what personal data are being collected, these documents are often lengthy and complicated. As a result, the vast majority of users do not read them at all, leading to data collection under uninformed consent. Several attempts have been made to make privacy policies more user friendly by summarising them, providing automatic annotations or labels for key sections, or by offering chat interfaces to ask specific questions. With recent advances in Large Language Models (LLMs), there is an opportunity to develop more effective tools to parse privacy policies and help users make informed decisions. In this paper, we propose an entailment-driven LLM based framework to classify paragraphs of privacy policies into meaningful labels that are easily understood by users. The results demonstrate that our framework outperforms traditional LLM methods, improving the F1 score in average by 11.2%. Additionally, our framework provides inherently explainable and meaningful predictions.
Collaborative Ground-Aerial Multi-Robot System for Disaster Response Missions with a Low-Cost Drone Add-On for Off-the-Shelf Drones
Apr 14, 2023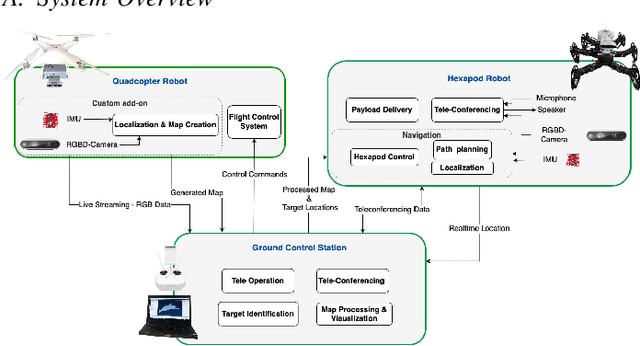

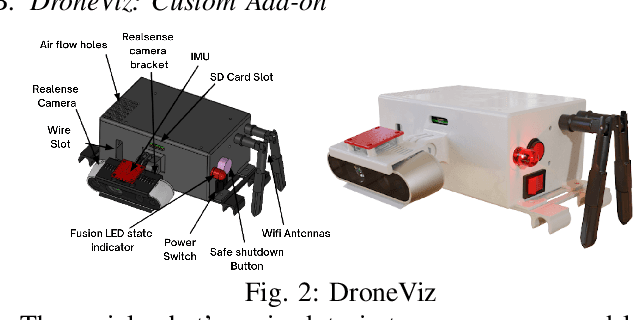
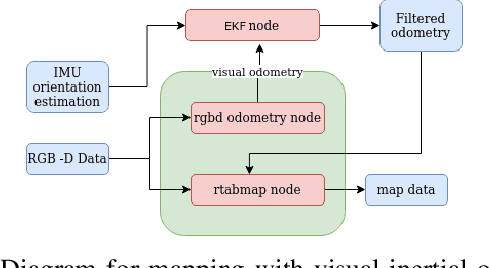
In disaster-stricken environments, it's vital to assess the damage quickly, analyse the stability of the environment, and allocate resources to the most vulnerable areas where victims might be present. These missions are difficult and dangerous to be conducted directly by humans. Using the complementary capabilities of both the ground and aerial robots, we investigate a collaborative approach of aerial and ground robots to address this problem. With an increased field of view, faster speed, and compact size, the aerial robot explores the area and creates a 3D feature-based map graph of the environment while providing a live video stream to the ground control station. Once the aerial robot finishes the exploration run, the ground control station processes the map and sends it to the ground robot. The ground robot, with its higher operation time, static stability, payload delivery and tele-conference capabilities, can then autonomously navigate to identified high-vulnerability locations. We have conducted experiments using a quadcopter and a hexapod robot in an indoor modelled environment with obstacles and uneven ground. Additionally, we have developed a low-cost drone add-on with value-added capabilities, such as victim detection, that can be attached to an off-the-shelf drone. The system was assessed for cost-effectiveness, energy efficiency, and scalability.
Accessible Torque Bandwidth of a Series Elastic Actuator Considering the Thermodynamic Limitations
Nov 12, 2020
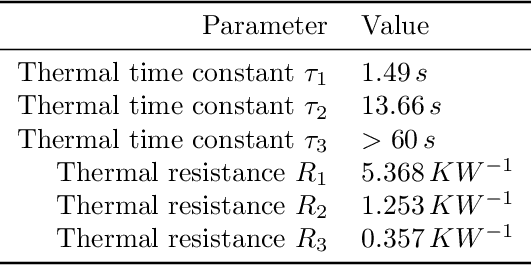
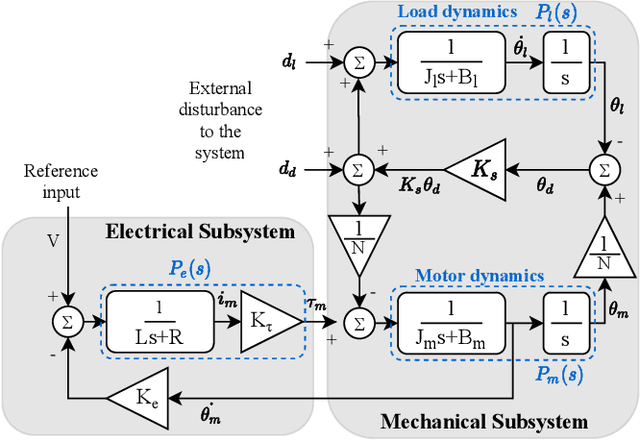
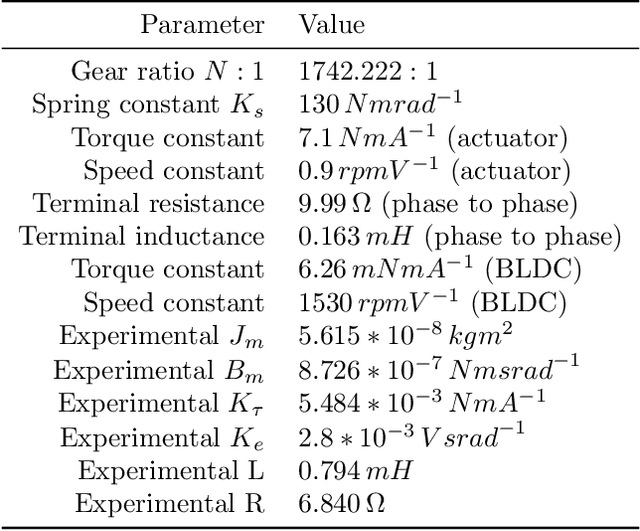
Within the scope of the paper, electromechanical and thermodynamic models are derived for a series elastic actuator and open loop and closed loop torque bandwidth parameters are analysed considering the thermodynamic behaviour of the actuator. It was observed that the closed loop torque bandwidth of the electromechanical subsystem of the actuator was not accessible in the entire torque reference amplitude range due to thermodynamic limitations. Therefore, a stator winding temperature estimation based adaptive controller is utilised and analysed to improve the accessibility of the controller based torque bandwidth. This paper implements the methodology on a HEBI Robotics X5-9 actuator as a case study.