 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Obstacle Legipulation with a Hexapod Robot
Nov 12, 2020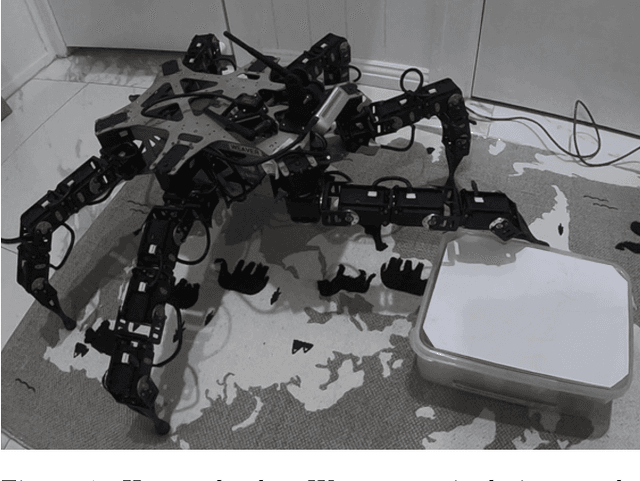


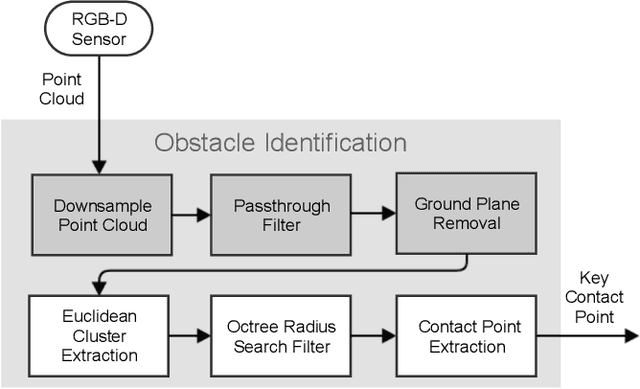
Legged robots traversing in confined environments could find their only path is blocked by obstacles. In circumstances where the obstacles are movable, a multilegged robot can manipulate the obstacles using its legs to allow it to continue on its path. We present a method for a hexapod robot to autonomously generate manipulation trajectories for detected obstacles. Using a RGB-D sensor as input, the obstacle is extracted from the environment and filtered to provide key contact points for the manipulation algorithm to calculate a trajectory to move the obstacle out of the path. Experiments on a 30 degree of freedom hexapod robot show the effectiveness of the algorithm in manipulating a range of obstacles in a 3D environment using its front legs.