 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel Framework for Learning Stochastic Representations for Sequence Generation and Recognition
Dec 30, 2024



The ability to generate and recognize sequential data is fundamental for autonomous systems operating in dynamic environments. Inspired by the key principles of the brain-predictive coding and the Bayesian brain-we propose a novel stochastic Recurrent Neural Network with Parametric Biases (RNNPB). The proposed model incorporates stochasticity into the latent space using the reparameterization trick used in variational autoencoders. This approach enables the model to learn probabilistic representations of multidimensional sequences, capturing uncertainty and enhancing robustness against overfitting. We tested the proposed model on a robotic motion dataset to assess its performance in generating and recognizing temporal patterns. The experimental results showed that the stochastic RNNPB model outperformed its deterministic counterpart in generating and recognizing motion sequences. The results highlighted the proposed model's capability to quantify and adjust uncertainty during both learning and inference. The stochasticity resulted in a continuous latent space representation, facilitating stable motion generation and enhanced generalization when recognizing novel sequences. Our approach provides a biologically inspired framework for modeling temporal patterns and advances the development of robust and adaptable systems in artificial intelligence and robotics.
Semi-supervised Gated Recurrent Neural Networks for Robotic Terrain Classification
Nov 24, 2020

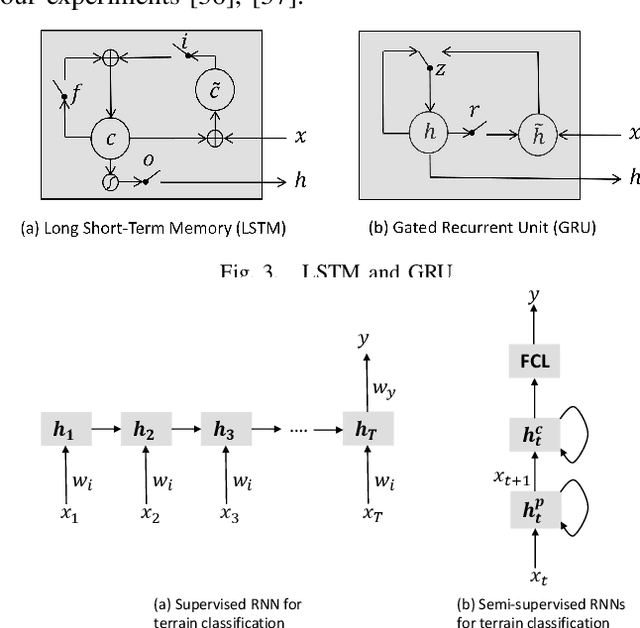
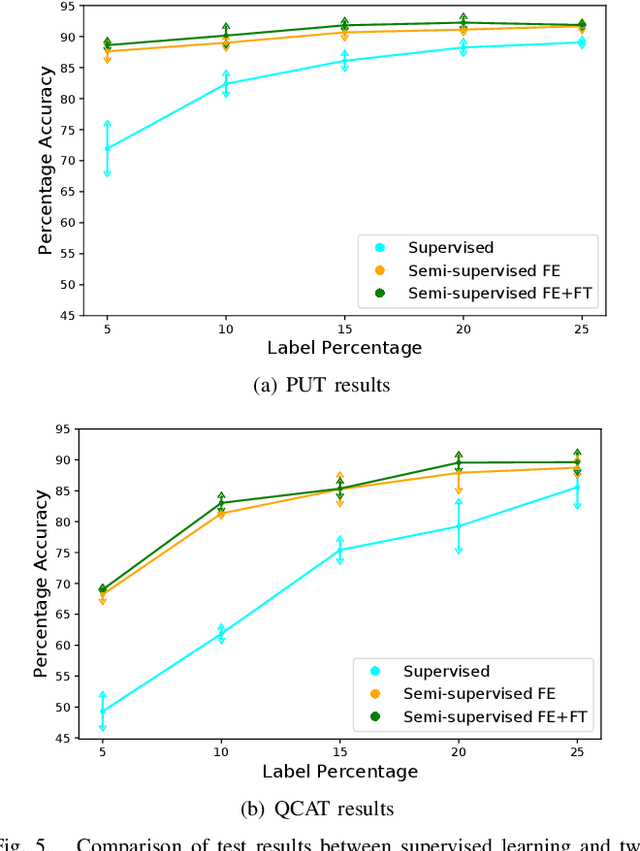
Legged robots are popular candidates for missions in challenging terrains due to the wide variety of locomotion strategies they can employ. Terrain classification is a key enabling technology for autonomous legged robots, as it allows the robot to harness their innate flexibility to adapt their behaviour to the demands of their operating environment. In this paper, we show how highly capable machine learning techniques, namely gated recurrent neural networks, allow our target legged robot to correctly classify the terrain it traverses in both supervised and semi-supervised fashions. Tests on a benchmark data set shows that our time-domain classifiers are well capable of dealing with raw and variable-length data with small amount of labels and perform to a level far exceeding the frequency-domain classifiers. The classification results on our own extended data set opens up a range of high-performance behaviours that are specific to those environments. Furthermore, we show how raw unlabelled data is used to improve significantly the classification results in a semi-supervised model.
Towards hybrid primary intersubjectivity: a neural robotics library for human science
Jun 29, 2020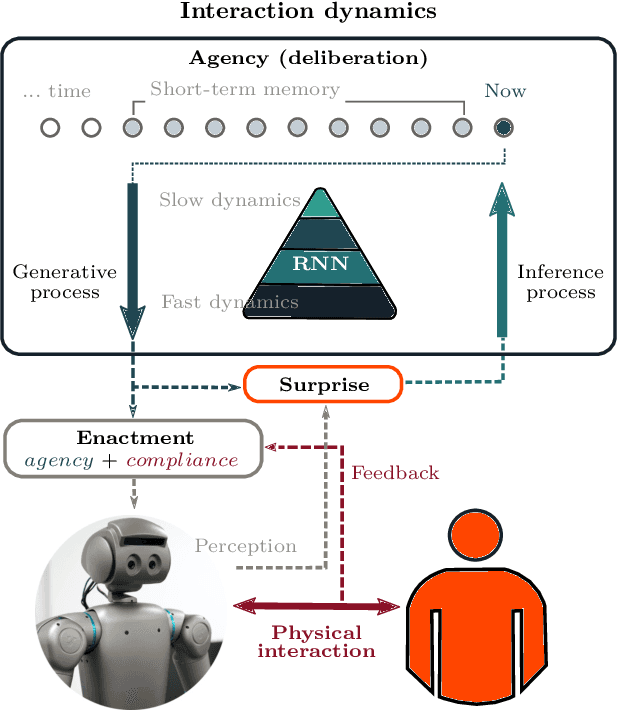



Human-robot interaction is becoming an interesting area of research in cognitive science, notably, for the study of social cognition. Interaction theorists consider primary intersubjectivity a non-mentalist, pre-theoretical, non-conceptual sort of processes that ground a certain level of communication and understanding, and provide support to higher-level cognitive skills. We argue this sort of low level cognitive interaction, where control is shared in dyadic encounters, is susceptible of study with neural robots. Hence, in this work we pursue three main objectives. Firstly, from the concept of active inference we study primary intersubjectivity as a second person perspective experience characterized by predictive engagement, where perception, cognition, and action are accounted for an hermeneutic circle in dyadic interaction. Secondly, we propose an open-source methodology named \textit{neural robotics library} (NRL) for experimental human-robot interaction, and a demonstration program for interacting in real-time with a virtual Cartesian robot (VCBot). Lastly, through a study case, we discuss some ways human-robot (hybrid) intersubjectivity can contribute to human science research, such as to the fields of developmental psychology, educational technology, and cognitive rehabilitation.
Learning to Embed Probabilistic Structures Between Deterministic Chaos and Random Process in a Variational Bayes Predictive-Coding RNN
Nov 04, 2018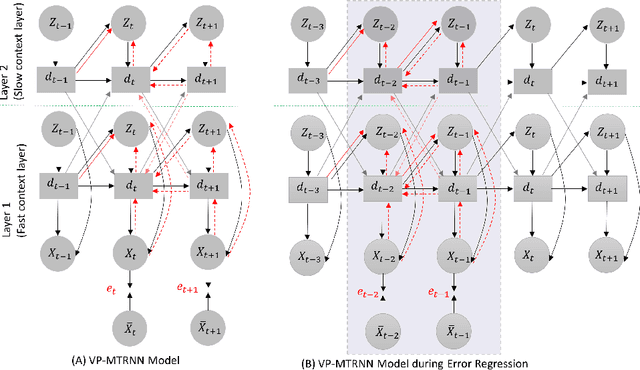

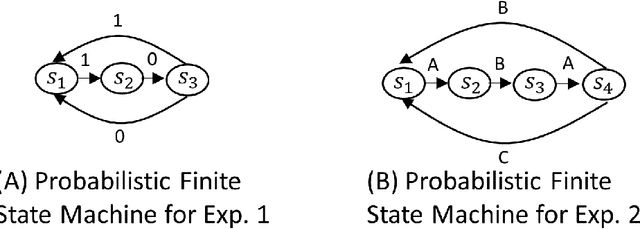

This study introduces a stochastic predictive-coding RNN model that can learn to extract probabilistic structures hidden in fluctuating temporal patterns by dynamically changing the uncertainty of latent variables. The learning process of the model involves maximizing the lower bound on the marginal likelihood of the sequential data, which consists of two terms. The first one is the expectation of prediction errors and the second one is the divergence of the prior and the approximated posterior. The main focus in the current study is to examine how weighting of the second term during learning affects the way of internally representing the uncertainty hidden in the sequence data. The simulation experiment on learning a simple probabilistic finite state machine demonstrates that the estimation of uncertainty in the latent variable approaches zero at each time step and that the network imitates the probabilistic structure of the target sequences by developing deterministic chaos in the case of the high weighting. On the contrary, in the case of the low weighting, the estimate of uncertainty increases significantly because of developing a random process in the network. The analysis shows that generalization in learning is most successful between these two extremes. Qualitatively, the same property has been observed in a trail of learning more complex sequence data consisting of probabilistic transitions between a set of hand-drawn primitive patterns using the model extended with hierarchy.
Bridging the Gap between Probabilistic and Deterministic Models: A Simulation Study on a Variational Bayes Predictive Coding Recurrent Neural Network Model
Sep 15, 2017


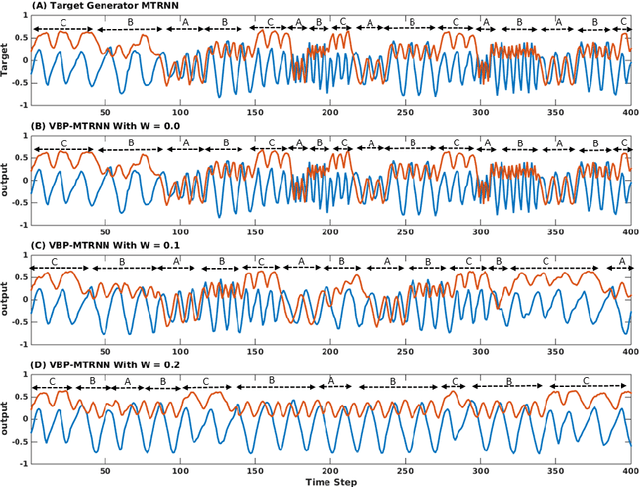
The current paper proposes a novel variational Bayes predictive coding RNN model, which can learn to generate fluctuated temporal patterns from exemplars. The model learns to maximize the lower bound of the weighted sum of the regularization and reconstruction error terms. We examined how this weighting can affect development of different types of information processing while learning fluctuated temporal patterns. Simulation results show that strong weighting of the reconstruction term causes the development of deterministic chaos for imitating the randomness observed in target sequences, while strong weighting of the regularization term causes the development of stochastic dynamics imitating probabilistic processes observed in targets. Moreover, results indicate that the most generalized learning emerges between these two extremes. The paper concludes with implications in terms of the underlying neuronal mechanisms for autism spectrum disorder and for free action.
Predictive Coding-based Deep Dynamic Neural Network for Visuomotor Learning
Jun 08, 2017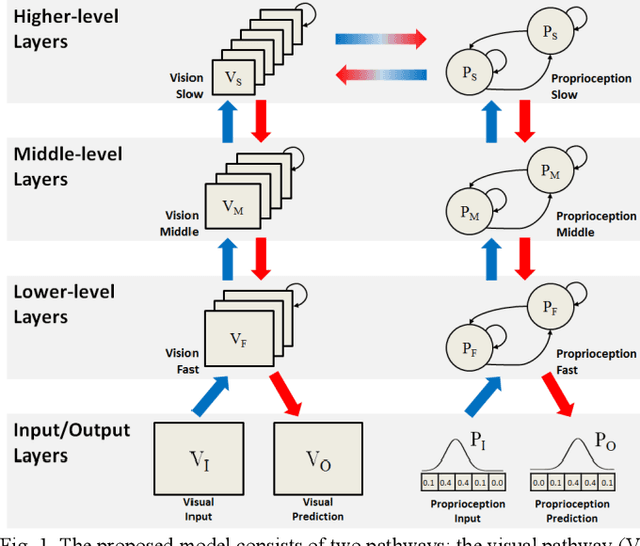
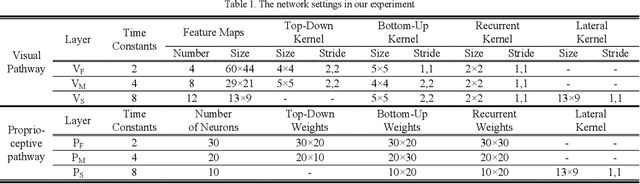
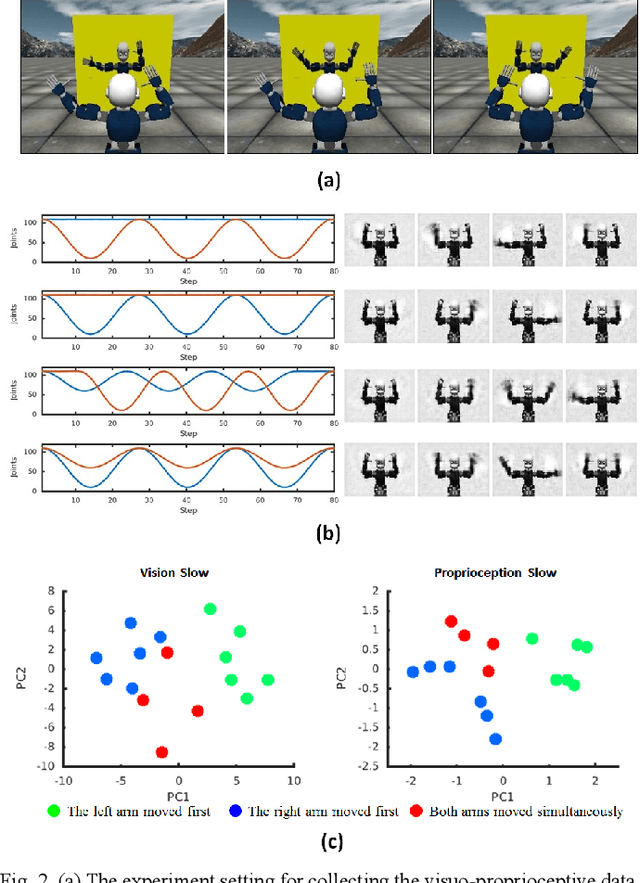
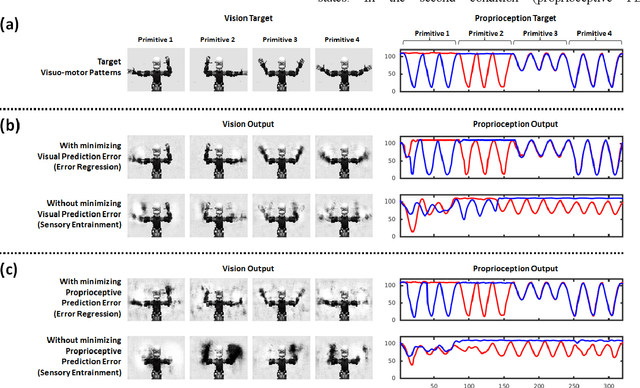
This study presents a dynamic neural network model based on the predictive coding framework for perceiving and predicting the dynamic visuo-proprioceptive patterns. In our previous study [1], we have shown that the deep dynamic neural network model was able to coordinate visual perception and action generation in a seamless manner. In the current study, we extended the previous model under the predictive coding framework to endow the model with a capability of perceiving and predicting dynamic visuo-proprioceptive patterns as well as a capability of inferring intention behind the perceived visuomotor information through minimizing prediction error. A set of synthetic experiments were conducted in which a robot learned to imitate the gestures of another robot in a simulation environment. The experimental results showed that with given intention states, the model was able to mentally simulate the possible incoming dynamic visuo-proprioceptive patterns in a top-down process without the inputs from the external environment. Moreover, the results highlighted the role of minimizing prediction error in inferring underlying intention of the perceived visuo-proprioceptive patterns, supporting the predictive coding account of the mirror neuron systems. The results also revealed that minimizing prediction error in one modality induced the recall of the corresponding representation of another modality acquired during the consolidative learning of raw-level visuo-proprioceptive patterns.