 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredictive Coding-based Deep Dynamic Neural Network for Visuomotor Learning
Paper and Code
Jun 08, 2017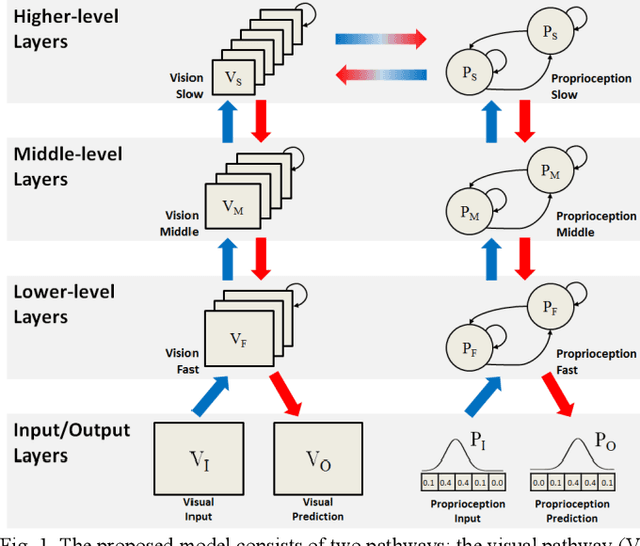
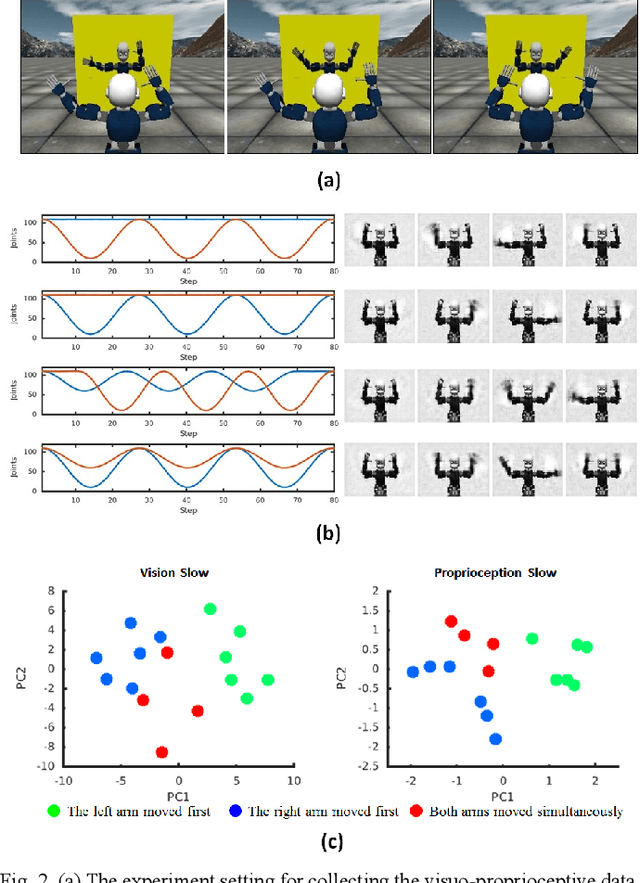
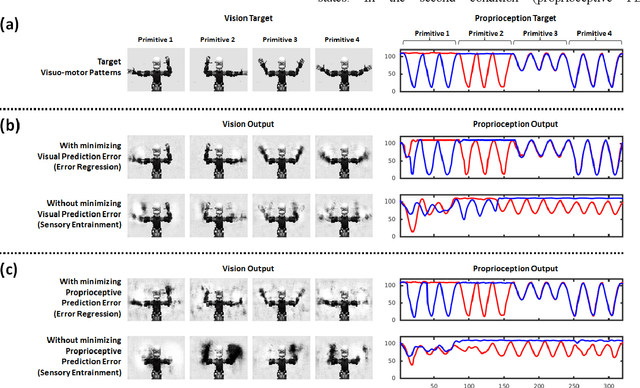
This study presents a dynamic neural network model based on the predictive coding framework for perceiving and predicting the dynamic visuo-proprioceptive patterns. In our previous study [1], we have shown that the deep dynamic neural network model was able to coordinate visual perception and action generation in a seamless manner. In the current study, we extended the previous model under the predictive coding framework to endow the model with a capability of perceiving and predicting dynamic visuo-proprioceptive patterns as well as a capability of inferring intention behind the perceived visuomotor information through minimizing prediction error. A set of synthetic experiments were conducted in which a robot learned to imitate the gestures of another robot in a simulation environment. The experimental results showed that with given intention states, the model was able to mentally simulate the possible incoming dynamic visuo-proprioceptive patterns in a top-down process without the inputs from the external environment. Moreover, the results highlighted the role of minimizing prediction error in inferring underlying intention of the perceived visuo-proprioceptive patterns, supporting the predictive coding account of the mirror neuron systems. The results also revealed that minimizing prediction error in one modality induced the recall of the corresponding representation of another modality acquired during the consolidative learning of raw-level visuo-proprioceptive patterns.