 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWildcat: Online Continuous-Time 3D Lidar-Inertial SLAM
Paper and Code
May 25, 2022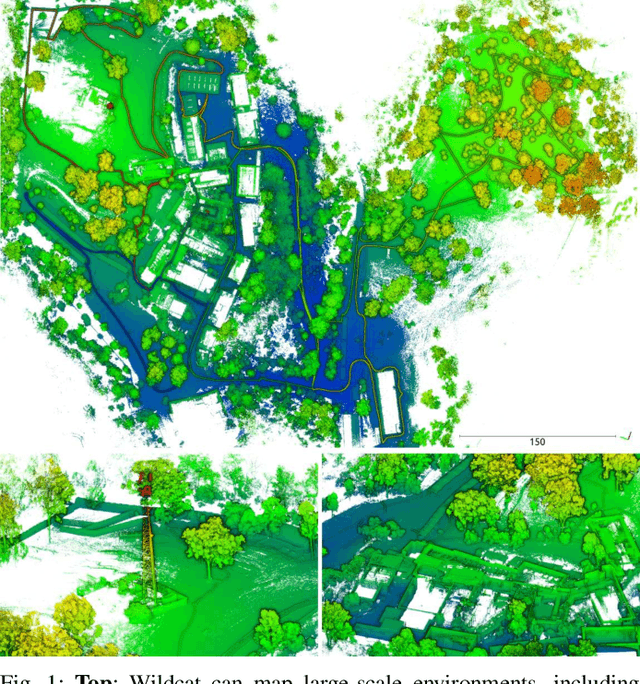
We present Wildcat, a novel online 3D lidar-inertial SLAM system with exceptional versatility and robustness. At its core, Wildcat combines a robust real-time lidar-inertial odometry module, utilising a continuous-time trajectory representation, with an efficient pose-graph optimisation module that seamlessly supports both the single- and multi-agent settings. The robustness of Wildcat was recently demonstrated in the DARPA Subterranean Challenge where it outperformed other SLAM systems across various types of sensing-degraded and perceptually challenging environments. In this paper, we extensively evaluate Wildcat in a diverse set of new and publicly available real-world datasets and showcase its superior robustness and versatility over two existing state-of-the-art lidar-inertial SLAM systems.