 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeterogeneous robot teams with unified perception and autonomy: How Team CSIRO Data61 tied for the top score at the DARPA Subterranean Challenge
Feb 26, 2023



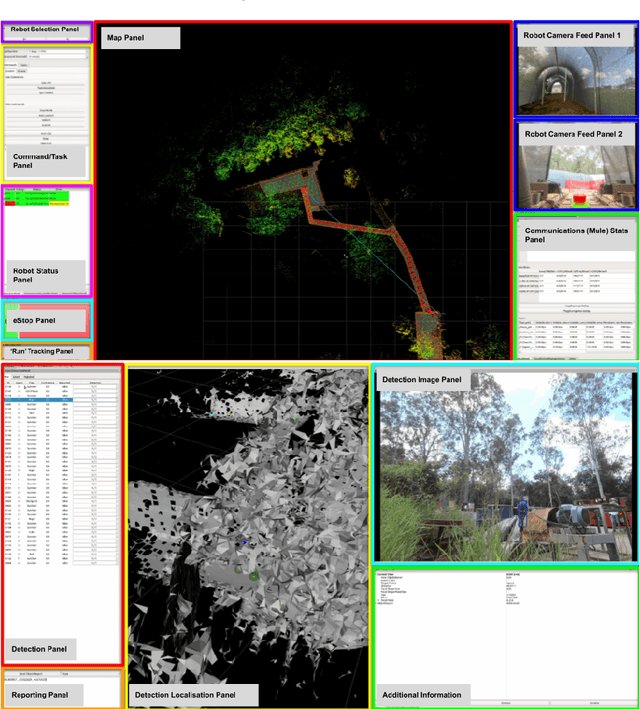
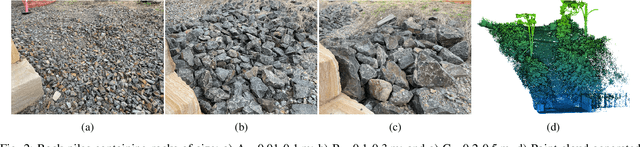
The DARPA Subterranean Challenge was designed for competitors to develop and deploy teams of autonomous robots to explore difficult unknown underground environments. Categorised in to human-made tunnels, underground urban infrastructure and natural caves, each of these subdomains had many challenging elements for robot perception, locomotion, navigation and autonomy. These included degraded wireless communication, poor visibility due to smoke, narrow passages and doorways, clutter, uneven ground, slippery and loose terrain, stairs, ledges, overhangs, dripping water, and dynamic obstacles that move to block paths among others. In the Final Event of this challenge held in September 2021, the course consisted of all three subdomains. The task was for the robot team to perform a scavenger hunt for a number of pre-defined artefacts within a limited time frame. Only one human supervisor was allowed to communicate with the robots once they were in the course. Points were scored when accurate detections and their locations were communicated back to the scoring server. A total of 8 teams competed in the finals held at the Mega Cavern in Louisville, KY, USA. This article describes the systems deployed by Team CSIRO Data61 that tied for the top score and won second place at the event.
Human-Robot Team Performance Compared to Full Robot Autonomy in 16 Real-World Search and Rescue Missions: Adaptation of the DARPA Subterranean Challenge
Dec 11, 2022
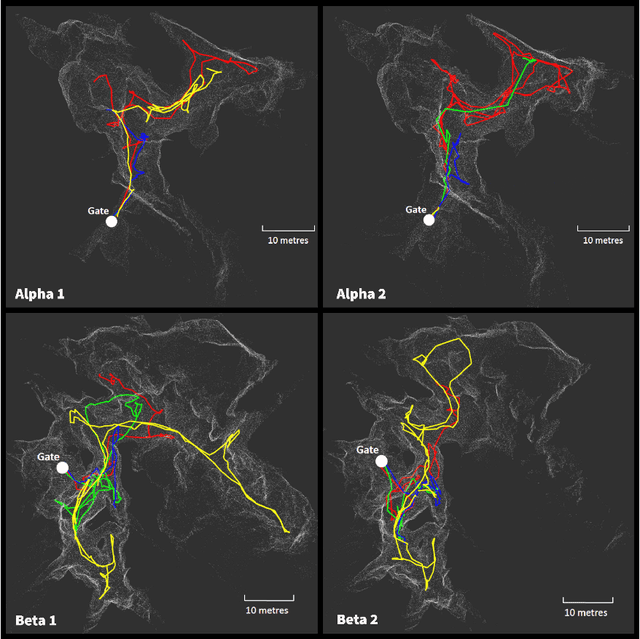
Human operators in human-robot teams are commonly perceived to be critical for mission success. To explore the direct and perceived impact of operator input on task success and team performance, 16 real-world missions (10 hrs) were conducted based on the DARPA Subterranean Challenge. These missions were to deploy a heterogeneous team of robots for a search task to locate and identify artifacts such as climbing rope, drills and mannequins representing human survivors. Two conditions were evaluated: human operators that could control the robot team with state-of-the-art autonomy (Human-Robot Team) compared to autonomous missions without human operator input (Robot-Autonomy). Human-Robot Teams were often in directed autonomy mode (70% of mission time), found more items, traversed more distance, covered more unique ground, and had a higher time between safety-related events. Human-Robot Teams were faster at finding the first artifact, but slower to respond to information from the robot team. In routine conditions, scores were comparable for artifacts, distance, and coverage. Reasons for intervention included creating waypoints to prioritise high-yield areas, and to navigate through error-prone spaces. After observing robot autonomy, operators reported increases in robot competency and trust, but that robot behaviour was not always transparent and understandable, even after high mission performance.
Deploying COTS Legged Robot Platforms into a Heterogeneous Robot Team
Jun 14, 2021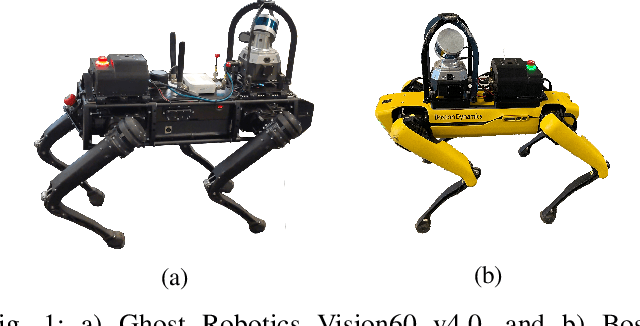
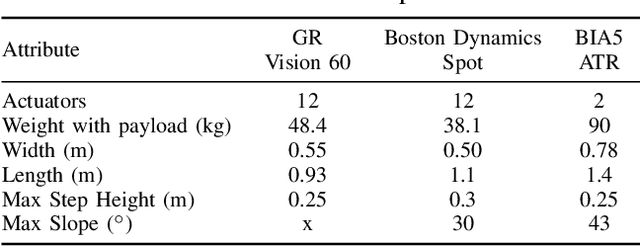
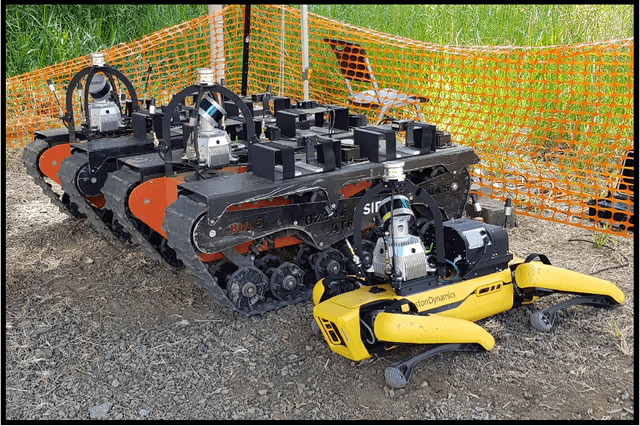
The recent availability of commercial-off-the-shelf (COTS) legged robot platforms have opened up new opportunities in deploying legged systems into different scenarios. While the main advantage of legged robots is their ability to traverse unstructured terrain, there are still large gaps between what robot platforms can achieve and their animal counterparts. Therefore, when deploying as part of a heterogeneous robot team of different platforms, it is beneficial to understand the different scenarios where a legged platform would perform better than a wheeled, tracked or aerial platform. Two COTS quadruped robots, Ghost Robotics' Vision 60 and Boston Dynamics' Spot, were deployed into a heterogeneous team. A description of some of the challenges faced while integrating the platforms, as well as some experiments in traversing different terrains are provided to give insight into the real-world deployment of legged robots.
Heterogeneous Ground and Air Platforms, Homogeneous Sensing: Team CSIRO Data61's Approach to the DARPA Subterranean Challenge
Apr 19, 2021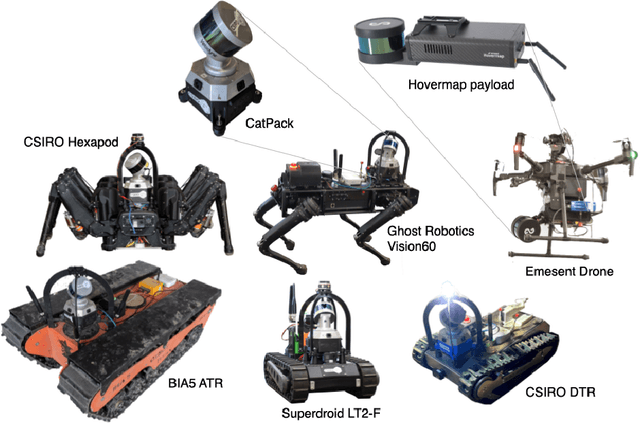
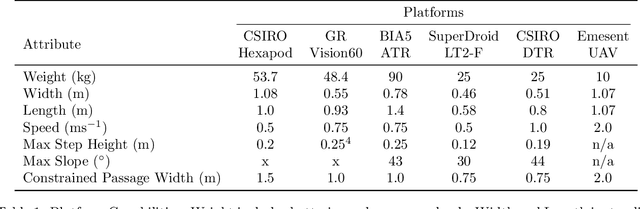
Heterogeneous teams of robots, leveraging a balance between autonomy and human interaction, bring powerful capabilities to the problem of exploring dangerous, unstructured subterranean environments. Here we describe the solution developed by Team CSIRO Data61, consisting of CSIRO, Emesent and Georgia Tech, during the DARPA Subterranean Challenge. These presented systems were fielded in the Tunnel Circuit in August 2019, the Urban Circuit in February 2020, and in our own Cave event, conducted in September 2020. A unique capability of the fielded team is the homogeneous sensing of the platforms utilised, which is leveraged to obtain a decentralised multi-agent SLAM solution on each platform (both ground agents and UAVs) using peer-to-peer communications. This enabled a shift in focus from constructing a pervasive communications network to relying on multi-agent autonomy, motivated by experiences in early circuit events. These experiences also showed the surprising capability of rugged tracked platforms for challenging terrain, which in turn led to the heterogeneous team structure based on a BIA5 OzBot Titan ground robot and an Emesent Hovermap UAV, supplemented by smaller tracked or legged ground robots. The ground agents use a common CatPack perception module, which allowed reuse of the perception and autonomy stack across all ground agents with minimal adaptation.