 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCentral pattern generators evolved for real-time adaptation
Paper and Code
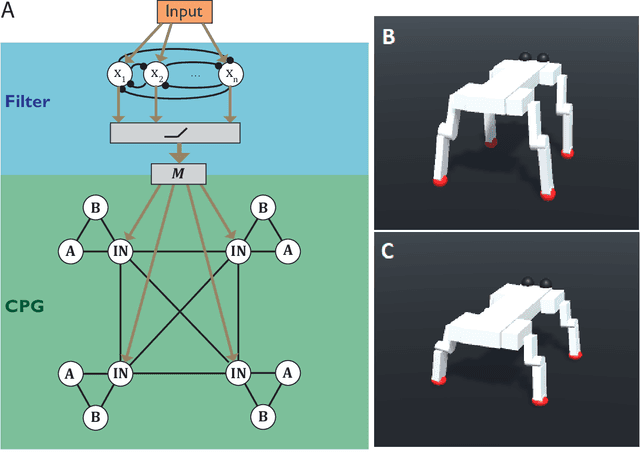
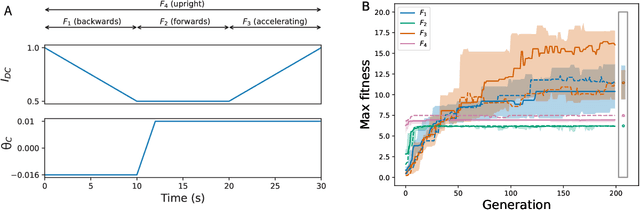
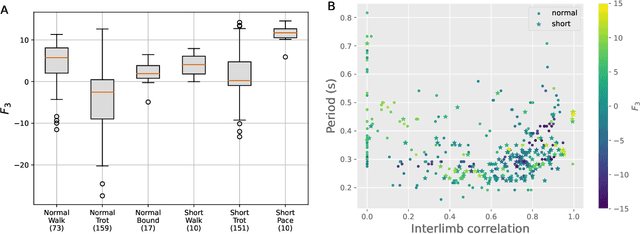
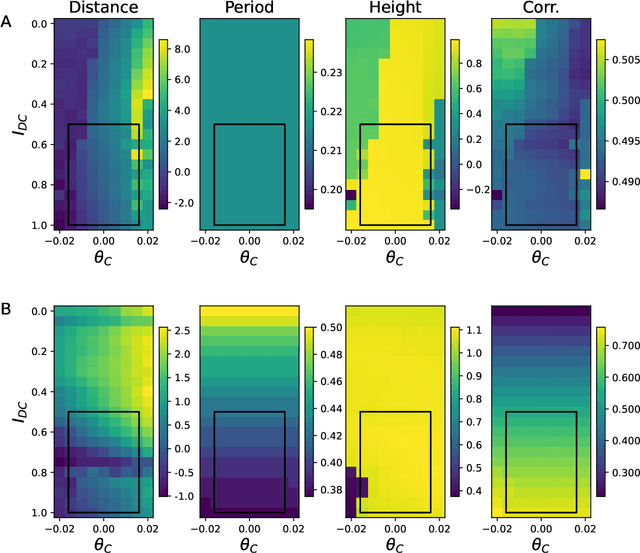
For a robot to be both autonomous and collaborative requires the ability to adapt its movement to a variety of external stimuli, whether these come from humans or other robots. Typically, legged robots have oscillation periods explicitly defined as a control parameter, limiting the adaptability of walking gaits. Here we demonstrate a virtual quadruped robot employing a bio-inspired central pattern generator (CPG) that can spontaneously synchronize its movement to a range of rhythmic stimuli. Multi-objective evolutionary algorithms were used to optimize the variation of movement speed and direction as a function of the brain stem drive and the center of mass control respectively. This was followed by optimization of an additional layer of neurons that filters fluctuating inputs. As a result, a range of CPGs were able to adjust their gait pattern and/or frequency to match the input period. We show how this can be used to facilitate coordinated movement despite differences in morphology, as well as to learn new movement patterns.