 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollective Decision-Making on Task Allocation Feasibility
May 13, 2024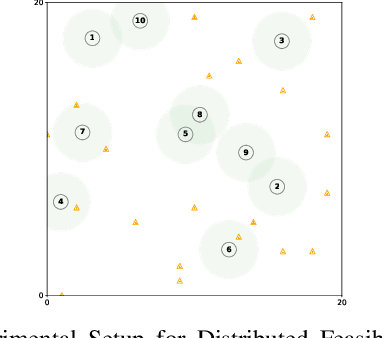
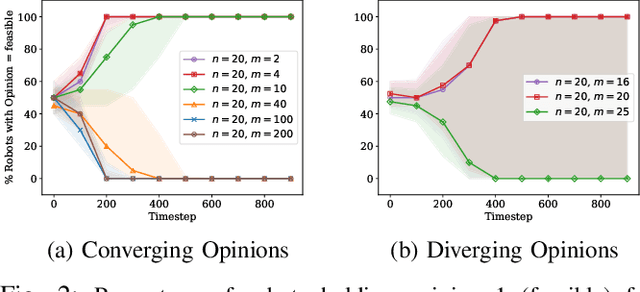
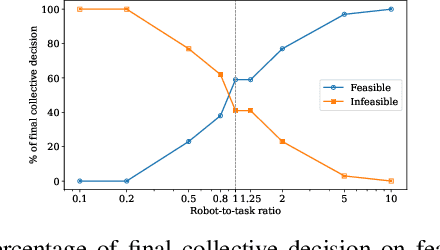
Robot swarms offer the potential to bring several advantages to the real-world applications but deploying them presents challenges in ensuring feasibility across diverse environments. Assessing the feasibility of new tasks for swarms is crucial to ensure the effective utilisation of resources, as well as to provide awareness of the suitability of a swarm solution for a particular task. In this paper, we introduce the concept of distributed feasibility, where the swarm collectively assesses the feasibility of task allocation based on local observations and interactions. We apply Direct Modulation of Majority-based Decisions as our collective decision-making strategy and show that, in a homogeneous setting, the swarm is able to collectively decide whether a given setup has a high or low feasibility as long as the robot-to-task ratio is not near one.