 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStonefish: Supporting Machine Learning Research in Marine Robotics
Feb 17, 2025Simulations are highly valuable in marine robotics, offering a cost-effective and controlled environment for testing in the challenging conditions of underwater and surface operations. Given the high costs and logistical difficulties of real-world trials, simulators capable of capturing the operational conditions of subsea environments have become key in developing and refining algorithms for remotely-operated and autonomous underwater vehicles. This paper highlights recent enhancements to the Stonefish simulator, an advanced open-source platform supporting development and testing of marine robotics solutions. Key updates include a suite of additional sensors, such as an event-based camera, a thermal camera, and an optical flow camera, as well as, visual light communication, support for tethered operations, improved thruster modelling, more flexible hydrodynamics, and enhanced sonar accuracy. These developments and an automated annotation tool significantly bolster Stonefish's role in marine robotics research, especially in the field of machine learning, where training data with a known ground truth is hard or impossible to collect.
Reliability Assessment and Safety Arguments for Machine Learning Components in Assuring Learning-Enabled Autonomous Systems
Nov 30, 2021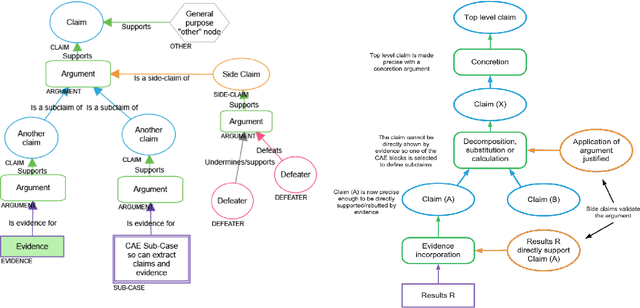

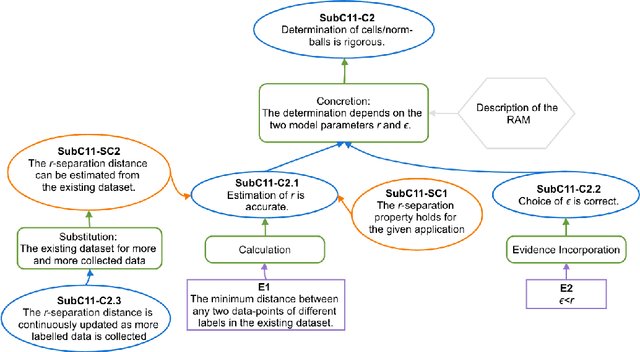
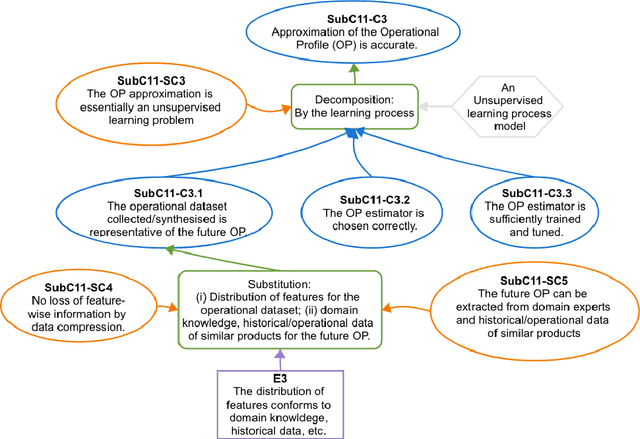
The increasing use of Machine Learning (ML) components embedded in autonomous systems -- so-called Learning-Enabled Systems (LES) -- has resulted in the pressing need to assure their functional safety. As for traditional functional safety, the emerging consensus within both, industry and academia, is to use assurance cases for this purpose. Typically assurance cases support claims of reliability in support of safety, and can be viewed as a structured way of organising arguments and evidence generated from safety analysis and reliability modelling activities. While such assurance activities are traditionally guided by consensus-based standards developed from vast engineering experience, LES pose new challenges in safety-critical application due to the characteristics and design of ML models. In this article, we first present an overall assurance framework for LES with an emphasis on quantitative aspects, e.g., breaking down system-level safety targets to component-level requirements and supporting claims stated in reliability metrics. We then introduce a novel model-agnostic Reliability Assessment Model (RAM) for ML classifiers that utilises the operational profile and robustness verification evidence. We discuss the model assumptions and the inherent challenges of assessing ML reliability uncovered by our RAM and propose practical solutions. Probabilistic safety arguments at the lower ML component-level are also developed based on the RAM. Finally, to evaluate and demonstrate our methods, we not only conduct experiments on synthetic/benchmark datasets but also demonstrate the scope of our methods with a comprehensive case study on Autonomous Underwater Vehicles in simulation.