 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed AI Agents for Cognitive Underwater Robot Autonomy
Jul 31, 2025



Achieving robust cognitive autonomy in robots navigating complex, unpredictable environments remains a fundamental challenge in robotics. This paper presents Underwater Robot Self-Organizing Autonomy (UROSA), a groundbreaking architecture leveraging distributed Large Language Model AI agents integrated within the Robot Operating System 2 (ROS 2) framework to enable advanced cognitive capabilities in Autonomous Underwater Vehicles. UROSA decentralises cognition into specialised AI agents responsible for multimodal perception, adaptive reasoning, dynamic mission planning, and real-time decision-making. Central innovations include flexible agents dynamically adapting their roles, retrieval-augmented generation utilising vector databases for efficient knowledge management, reinforcement learning-driven behavioural optimisation, and autonomous on-the-fly ROS 2 node generation for runtime functional extensibility. Extensive empirical validation demonstrates UROSA's promising adaptability and reliability through realistic underwater missions in simulation and real-world deployments, showing significant advantages over traditional rule-based architectures in handling unforeseen scenarios, environmental uncertainties, and novel mission objectives. This work not only advances underwater autonomy but also establishes a scalable, safe, and versatile cognitive robotics framework capable of generalising to a diverse array of real-world applications.
Advancing Shared and Multi-Agent Autonomy in Underwater Missions: Integrating Knowledge Graphs and Retrieval-Augmented Generation
Jul 27, 2025Robotic platforms have become essential for marine operations by providing regular and continuous access to offshore assets, such as underwater infrastructure inspection, environmental monitoring, and resource exploration. However, the complex and dynamic nature of underwater environments, characterized by limited visibility, unpredictable currents, and communication constraints, presents significant challenges that demand advanced autonomy while ensuring operator trust and oversight. Central to addressing these challenges are knowledge representation and reasoning techniques, particularly knowledge graphs and retrieval-augmented generation (RAG) systems, that enable robots to efficiently structure, retrieve, and interpret complex environmental data. These capabilities empower robotic agents to reason, adapt, and respond effectively to changing conditions. The primary goal of this work is to demonstrate both multi-agent autonomy and shared autonomy, where multiple robotic agents operate independently while remaining connected to a human supervisor. We show how a RAG-powered large language model, augmented with knowledge graph data and domain taxonomy, enables autonomous multi-agent decision-making and facilitates seamless human-robot interaction, resulting in 100\% mission validation and behavior completeness. Finally, ablation studies reveal that without structured knowledge from the graph and/or taxonomy, the LLM is prone to hallucinations, which can compromise decision quality.
Context-Aware Behavior Learning with Heuristic Motion Memory for Underwater Manipulation
Jul 18, 2025



Autonomous motion planning is critical for efficient and safe underwater manipulation in dynamic marine environments. Current motion planning methods often fail to effectively utilize prior motion experiences and adapt to real-time uncertainties inherent in underwater settings. In this paper, we introduce an Adaptive Heuristic Motion Planner framework that integrates a Heuristic Motion Space (HMS) with Bayesian Networks to enhance motion planning for autonomous underwater manipulation. Our approach employs the Probabilistic Roadmap (PRM) algorithm within HMS to optimize paths by minimizing a composite cost function that accounts for distance, uncertainty, energy consumption, and execution time. By leveraging HMS, our framework significantly reduces the search space, thereby boosting computational performance and enabling real-time planning capabilities. Bayesian Networks are utilized to dynamically update uncertainty estimates based on real-time sensor data and environmental conditions, thereby refining the joint probability of path success. Through extensive simulations and real-world test scenarios, we showcase the advantages of our method in terms of enhanced performance and robustness. This probabilistic approach significantly advances the capability of autonomous underwater robots, ensuring optimized motion planning in the face of dynamic marine challenges.
MarineGym: A High-Performance Reinforcement Learning Platform for Underwater Robotics
Mar 12, 2025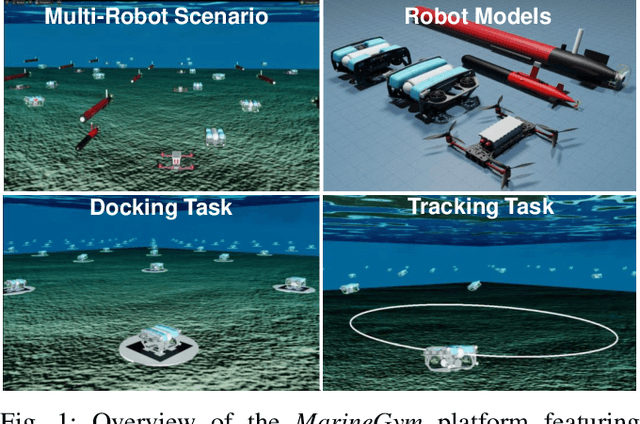
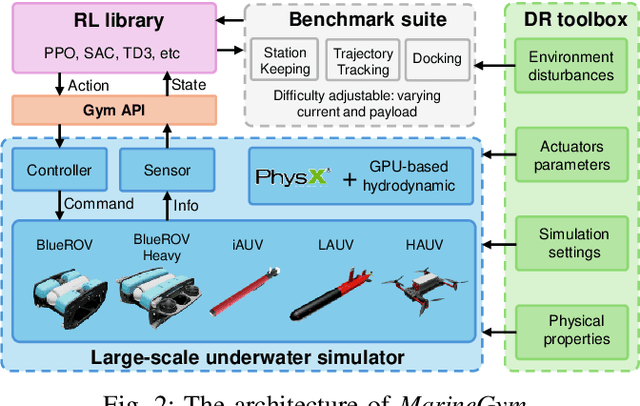
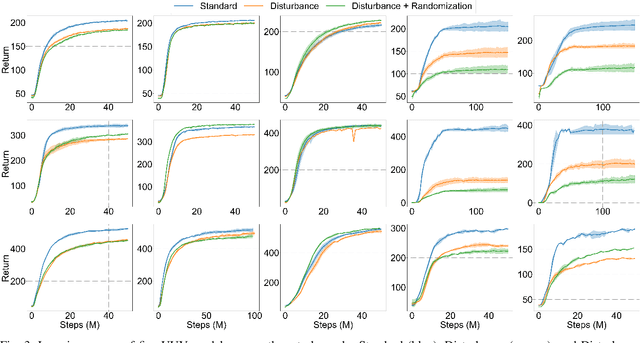
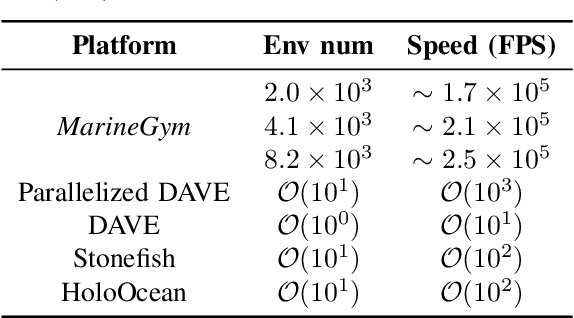
This work presents the MarineGym, a high-performance reinforcement learning (RL) platform specifically designed for underwater robotics. It aims to address the limitations of existing underwater simulation environments in terms of RL compatibility, training efficiency, and standardized benchmarking. MarineGym integrates a proposed GPU-accelerated hydrodynamic plugin based on Isaac Sim, achieving a rollout speed of 250,000 frames per second on a single NVIDIA RTX 3060 GPU. It also provides five models of unmanned underwater vehicles (UUVs), multiple propulsion systems, and a set of predefined tasks covering core underwater control challenges. Additionally, the DR toolkit allows flexible adjustments of simulation and task parameters during training to improve Sim2Real transfer. Further benchmark experiments demonstrate that MarineGym improves training efficiency over existing platforms and supports robust policy adaptation under various perturbations. We expect this platform could drive further advancements in RL research for underwater robotics. For more details about MarineGym and its applications, please visit our project page: https://marine-gym.com/.
Stonefish: Supporting Machine Learning Research in Marine Robotics
Feb 17, 2025Simulations are highly valuable in marine robotics, offering a cost-effective and controlled environment for testing in the challenging conditions of underwater and surface operations. Given the high costs and logistical difficulties of real-world trials, simulators capable of capturing the operational conditions of subsea environments have become key in developing and refining algorithms for remotely-operated and autonomous underwater vehicles. This paper highlights recent enhancements to the Stonefish simulator, an advanced open-source platform supporting development and testing of marine robotics solutions. Key updates include a suite of additional sensors, such as an event-based camera, a thermal camera, and an optical flow camera, as well as, visual light communication, support for tethered operations, improved thruster modelling, more flexible hydrodynamics, and enhanced sonar accuracy. These developments and an automated annotation tool significantly bolster Stonefish's role in marine robotics research, especially in the field of machine learning, where training data with a known ground truth is hard or impossible to collect.
Digital Twins Below the Surface: Enhancing Underwater Teleoperation
Feb 12, 2024Subsea exploration, inspection, and intervention operations heavily rely on remotely operated vehicles (ROVs). However, the inherent complexity of the underwater environment presents significant challenges to the operators of these vehicles. This paper delves into the challenges associated with navigation and maneuvering tasks in the teleoperation of ROVs, such as reduced situational awareness and heightened teleoperator workload. To address these challenges, we introduce an underwater Digital Twin (DT) system designed to enhance underwater teleoperation, enable autonomous navigation, support system monitoring, and facilitate system testing through simulation. Our approach involves a dynamic representation of the underwater robot and its environment using desktop virtual reality, as well as the integration of mapping, localization, path planning and simulation capabilities within the DT system. Our research demonstrates the system's adaptability, versatility and feasibility, highlighting significant challenges and, in turn, improving the teleoperators' situational awareness and reducing their workload.