 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReceding Horizon Control on the Broadcast of Information in Stochastic Networks
Paper and Code
Dec 19, 2022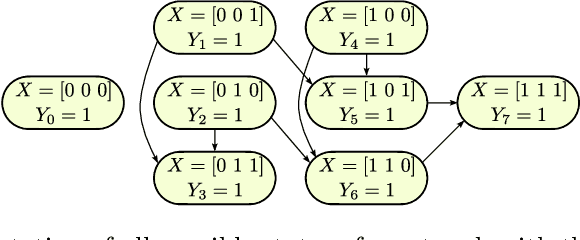
This paper focuses on the broadcast of information on robot networks with stochastic network interconnection topologies. Problematic communication networks are almost unavoidable in areas where we wish to deploy multi-robotic systems, usually due to a lack of environmental consistency, accessibility, and structure. We tackle this problem by modeling the broadcast of information in a multi-robot communication network as a stochastic process with random arrival times, which can be produced by irregular robot movements, wireless attenuation, and other environmental factors. Using this model, we provide and analyze a receding horizon control strategy to control the statistics of the information broadcast. The resulting strategy compels the robots to re-direct their communication resources to different neighbors according to the current propagation process to fulfill global broadcast requirements. Based on this method, we provide an approach to compute the expected time to broadcast the message to all nodes. Numerical examples are provided to illustrate the results.