 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Sample Efficiency and Uncertainty Compensation in Learning-based Model Predictive Control for Aerial Robots
Paper and Code
Aug 01, 2023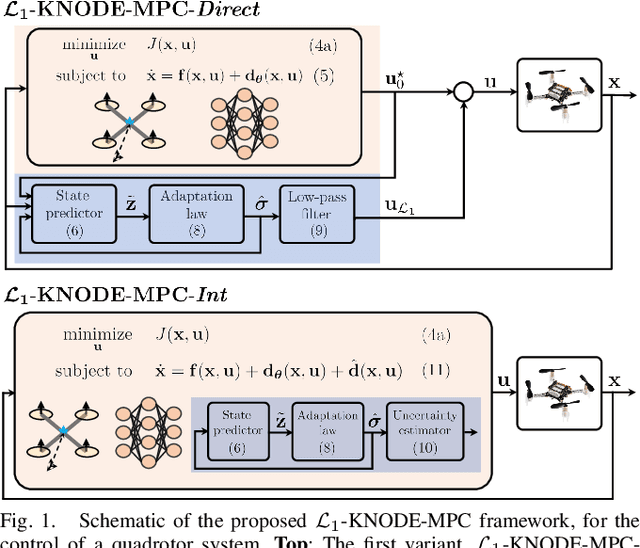



The recent increase in data availability and reliability has led to a surge in the development of learning-based model predictive control (MPC) frameworks for robot systems. Despite attaining substantial performance improvements over their non-learning counterparts, many of these frameworks rely on an offline learning procedure to synthesize a dynamics model. This implies that uncertainties encountered by the robot during deployment are not accounted for in the learning process. On the other hand, learning-based MPC methods that learn dynamics models online are computationally expensive and often require a significant amount of data. To alleviate these shortcomings, we propose a novel learning-enhanced MPC framework that incorporates components from $\mathcal{L}_1$ adaptive control into learning-based MPC. This integration enables the accurate compensation of both matched and unmatched uncertainties in a sample-efficient way, enhancing the control performance during deployment. In our proposed framework, we present two variants and apply them to the control of a quadrotor system. Through simulations and physical experiments, we demonstrate that the proposed framework not only allows the synthesis of an accurate dynamics model on-the-fly, but also significantly improves the closed-loop control performance under a wide range of spatio-temporal uncertainties.