 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderactuated Biomimetic Autonomous Underwater Vehicle for Ecosystem Monitoring
Nov 09, 2025In this paper, we present an underactuated biomimetic underwater robot that is suitable for ecosystem monitoring in both marine and freshwater environments. We present an updated mechanical design for a fish-like robot and propose minimal actuation behaviors learned using reinforcement learning techniques. We present our preliminary mechanical design of the tail oscillation mechanism and illustrate the swimming behaviors on FishGym simulator, where the reinforcement learning techniques will be tested on
SANGO: Socially Aware Navigation through Grouped Obstacles
Nov 29, 2024



This paper introduces SANGO (Socially Aware Navigation through Grouped Obstacles), a novel method that ensures socially appropriate behavior by dynamically grouping obstacles and adhering to social norms. Using deep reinforcement learning, SANGO trains agents to navigate complex environments leveraging the DBSCAN algorithm for obstacle clustering and Proximal Policy Optimization (PPO) for path planning. The proposed approach improves safety and social compliance by maintaining appropriate distances and reducing collision rates. Extensive experiments conducted in custom simulation environments demonstrate SANGO's superior performance in significantly reducing discomfort (by up to 83.5%), reducing collision rates (by up to 29.4%) and achieving higher successful navigation in dynamic and crowded scenarios. These findings highlight the potential of SANGO for real-world applications, paving the way for advanced socially adept robotic navigation systems.
Distributed Multi-robot Online Sampling with Budget Constraints
Jul 26, 2024In multi-robot informative path planning the problem is to find a route for each robot in a team to visit a set of locations that can provide the most useful data to reconstruct an unknown scalar field. In the budgeted version, each robot is subject to a travel budget limiting the distance it can travel. Our interest in this problem is motivated by applications in precision agriculture, where robots are used to collect measurements to estimate domain-relevant scalar parameters such as soil moisture or nitrates concentrations. In this paper, we propose an online, distributed multi-robot sampling algorithm based on Monte Carlo Tree Search (MCTS) where each robot iteratively selects the next sampling location through communication with other robots and considering its remaining budget. We evaluate our proposed method for varying team sizes and in different environments, and we compare our solution with four different baseline methods. Our experiments show that our solution outperforms the baselines when the budget is tight by collecting measurements leading to smaller reconstruction errors.
Thoracic Surgery Video Analysis for Surgical Phase Recognition
Jun 13, 2024This paper presents an approach for surgical phase recognition using video data, aiming to provide a comprehensive understanding of surgical procedures for automated workflow analysis. The advent of robotic surgery, digitized operating rooms, and the generation of vast amounts of data have opened doors for the application of machine learning and computer vision in the analysis of surgical videos. Among these advancements, Surgical Phase Recognition(SPR) stands out as an emerging technology that has the potential to recognize and assess the ongoing surgical scenario, summarize the surgery, evaluate surgical skills, offer surgical decision support, and facilitate medical training. In this paper, we analyse and evaluate both frame-based and video clipping-based phase recognition on thoracic surgery dataset consisting of 11 classes of phases. Specifically, we utilize ImageNet ViT for image-based classification and VideoMAE as the baseline model for video-based classification. We show that Masked Video Distillation(MVD) exhibits superior performance, achieving a top-1 accuracy of 72.9%, compared to 52.31% achieved by ImageNet ViT. These findings underscore the efficacy of video-based classifiers over their image-based counterparts in surgical phase recognition tasks.
* 2 pages, 2 figures
Towards Understanding Underwater Weather Events in Rivers Using Autonomous Surface Vehicles
Dec 21, 2023



Climate change has increased the frequency and severity of extreme weather events such as hurricanes and winter storms. The complex interplay of floods with tides, runoff, and sediment creates additional hazards -- including erosion and the undermining of urban infrastructure -- consequently impacting the health of our rivers and ecosystems. Observations of these underwater phenomena are rare, because satellites and sensors mounted on aerial vehicles cannot penetrate the murky waters. Autonomous Surface Vehicles (ASVs) provides a means to track and map these complex and dynamic underwater phenomena. This work highlights preliminary results of high-resolution data gathering with ASVs, equipped with a suite of sensors capable of measuring physical and chemical parameters of the river. Measurements were acquired along the lower Schuylkill River in the Philadelphia area at high-tide and low-tide conditions. The data will be leveraged to improve our understanding of changes in bathymetry due to floods; the dynamics of mixing and stagnation zones and their impact on water quality; and the dynamics of suspension and resuspension of fine sediment. The data will also provide insight into the development of adaptive sampling strategies for ASVs that can maximize the information gain for future field experiments.
Leveraging Predictive Models for Adaptive Sampling of Spatiotemporal Fluid Processes
Apr 03, 2023



Persistent monitoring of a spatiotemporal fluid process requires data sampling and predictive modeling of the process being monitored. In this paper we present PASST algorithm: Predictive-model based Adaptive Sampling of a Spatio-Temporal process. PASST is an adaptive robotic sampling algorithm that leverages predictive models to efficiently and persistently monitor a fluid process in a given region of interest. Our algorithm makes use of the predictions from a learned prediction model to plan a path for an autonomous vehicle to adaptively and efficiently survey the region of interest. In turn, the sampled data is used to obtain better predictions by giving an updated initial state to the predictive model. For predictive model, we use Knowledged-based Neural Ordinary Differential Equations to train models of fluid processes. These models are orders of magnitude smaller in size and run much faster than fluid data obtained from direct numerical simulations of the partial differential equations that describe the fluid processes or other comparable computational fluids models. For path planning, we use reinforcement learning based planning algorithms that use the field predictions as reward functions. We evaluate our adaptive sampling path planning algorithm on both numerically simulated fluid data and real-world nowcast ocean flow data to show that we can sample the spatiotemporal field in the given region of interest for long time horizons. We also evaluate PASST algorithm's generalization ability to sample from fluid processes that are not in the training repertoire of the learned models.
Reinforcement Learning for Agile Active Target Sensing with a UAV
Dec 16, 2022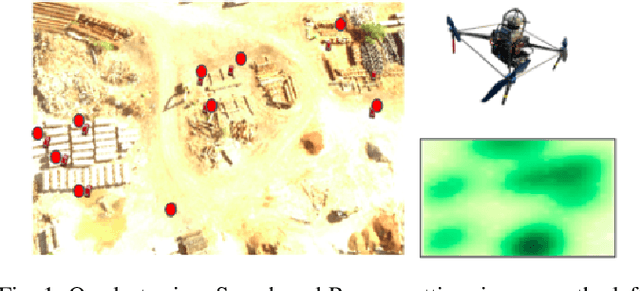
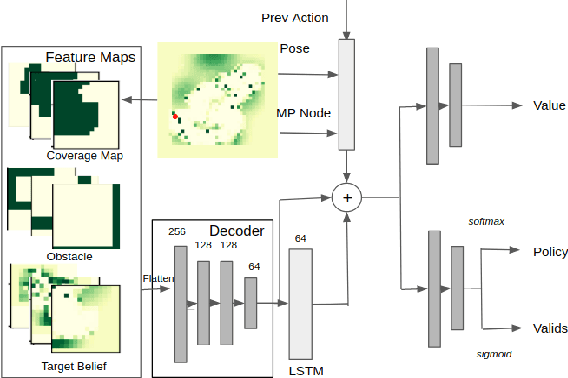
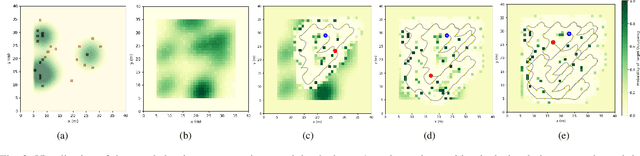
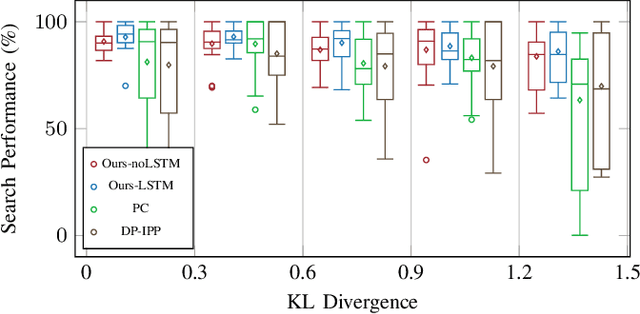
Active target sensing is the task of discovering and classifying an unknown number of targets in an environment and is critical in search-and-rescue missions. This paper develops a deep reinforcement learning approach to plan informative trajectories that increase the likelihood for an uncrewed aerial vehicle (UAV) to discover missing targets. Our approach efficiently (1) explores the environment to discover new targets, (2) exploits its current belief of the target states and incorporates inaccurate sensor models for high-fidelity classification, and (3) generates dynamically feasible trajectories for an agile UAV by employing a motion primitive library. Extensive simulations on randomly generated environments show that our approach is more efficient in discovering and classifying targets than several other baselines. A unique characteristic of our approach, in contrast to heuristic informative path planning approaches, is that it is robust to varying amounts of deviations of the prior belief from the true target distribution, thereby alleviating the challenge of designing heuristics specific to the application conditions.
Adaptive Sampling of Latent Phenomena using Heterogeneous Robot Teams (ASLaP-HR)
Aug 11, 2022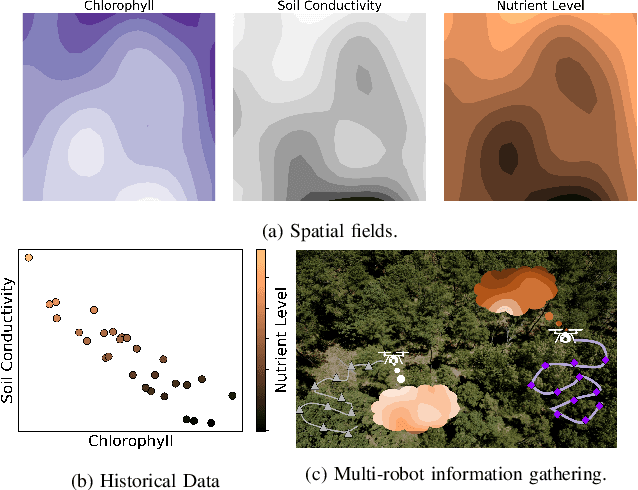
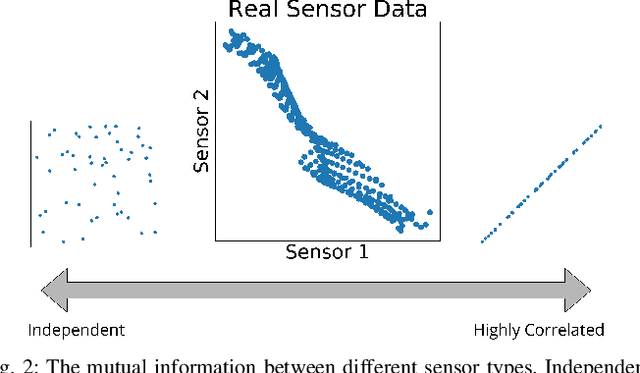
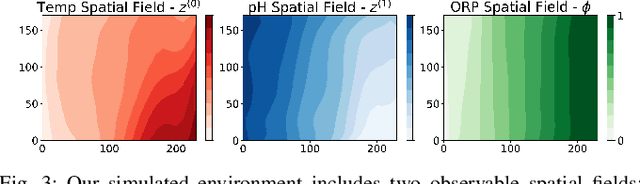
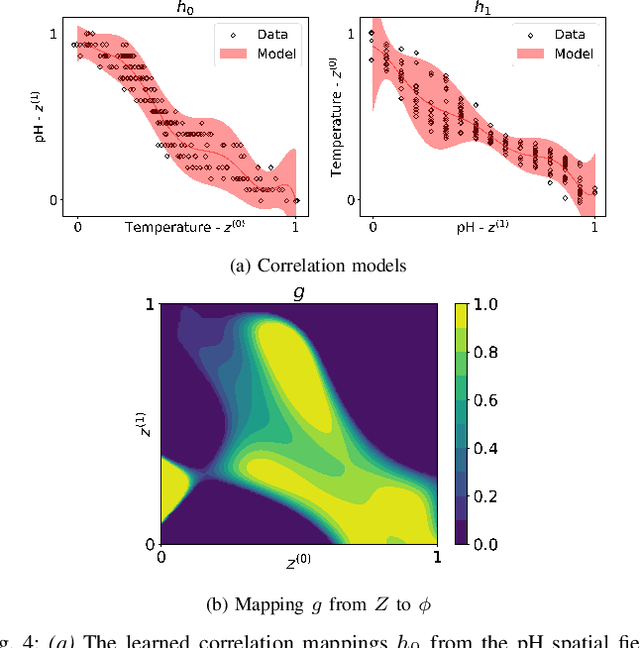
In this paper, we present an online adaptive planning strategy for a team of robots with heterogeneous sensors to sample from a latent spatial field using a learned model for decision making. Current robotic sampling methods seek to gather information about an observable spatial field. However, many applications, such as environmental monitoring and precision agriculture, involve phenomena that are not directly observable or are costly to measure, called latent phenomena. In our approach, we seek to reason about the latent phenomenon in real-time by effectively sampling the observable spatial fields using a team of robots with heterogeneous sensors, where each robot has a distinct sensor to measure a different observable field. The information gain is estimated using a learned model that maps from the observable spatial fields to the latent phenomenon. This model captures aleatoric uncertainty in the relationship to allow for information theoretic measures. Additionally, we explicitly consider the correlations among the observable spatial fields, capturing the relationship between sensor types whose observations are not independent. We show it is possible to learn these correlations, and investigate the impact of the learned correlation models on the performance of our sampling approach. Through our qualitative and quantitative results, we illustrate that empirically learned correlations improve the overall sampling efficiency of the team. We simulate our approach using a data set of sensor measurements collected on Lac Hertel, in Quebec, which we make publicly available.
MARLAS: Multi Agent Reinforcement Learning for cooperated Adaptive Sampling
Jul 15, 2022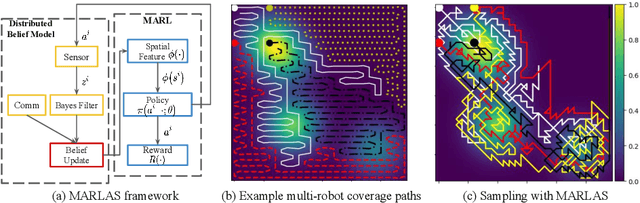
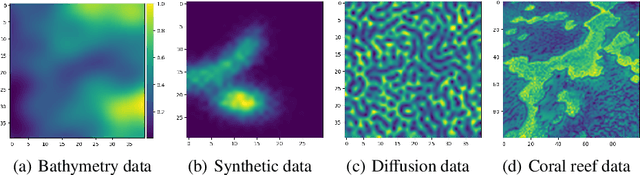
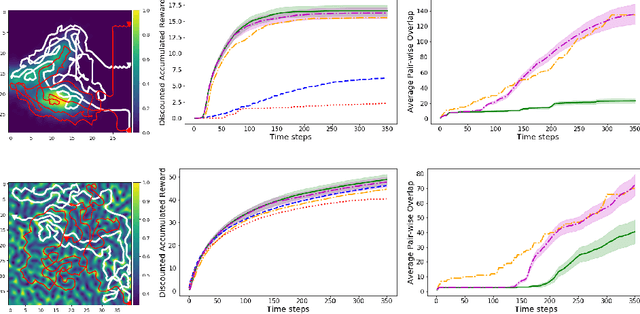
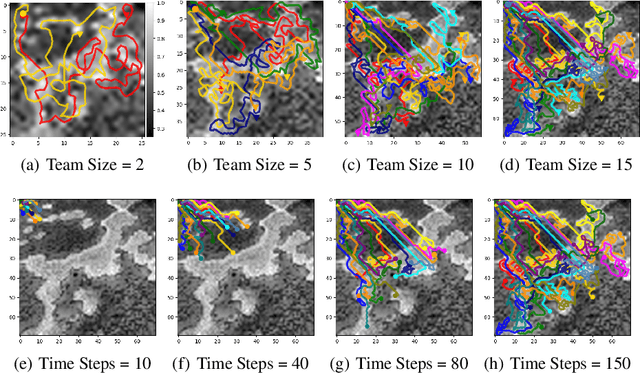
The multi-robot adaptive sampling problem aims at finding trajectories for a team of robots to efficiently sample the phenomenon of interest within a given endurance budget of the robots. In this paper, we propose a robust and scalable approach using decentralized Multi-Agent Reinforcement Learning for cooperated Adaptive Sampling (MARLAS) of quasi-static environmental processes. Given a prior on the field being sampled, the proposed method learns decentralized policies for a team of robots to sample high-utility regions within a fixed budget. The multi-robot adaptive sampling problem requires the robots to coordinate with each other to avoid overlapping sampling trajectories. Therefore, we encode the estimates of neighbor positions and intermittent communication between robots into the learning process. We evaluated MARLAS over multiple performance metrics and found it to outperform other baseline multi-robot sampling techniques. We further demonstrate robustness to communication failures and scalability with both the size of the robot team and the size of the region being sampled. The experimental evaluations are conducted both in simulations on real data and in real robot experiments on demo environmental setup.
An Autonomous Probing System for Collecting Measurements at Depth from Small Surface Vehicles
Oct 27, 2021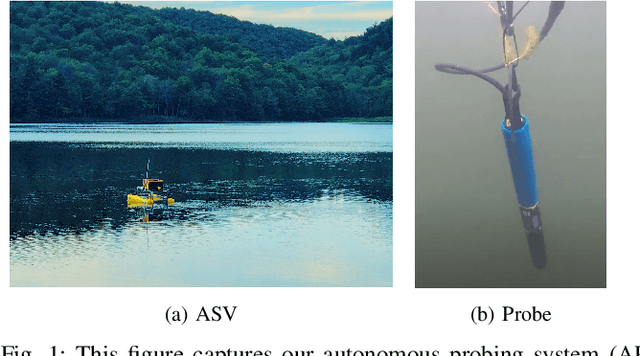
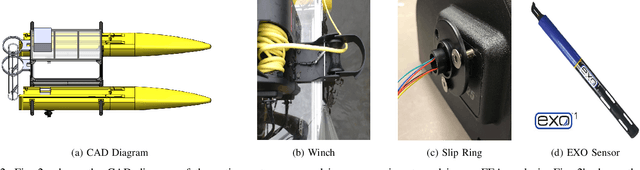
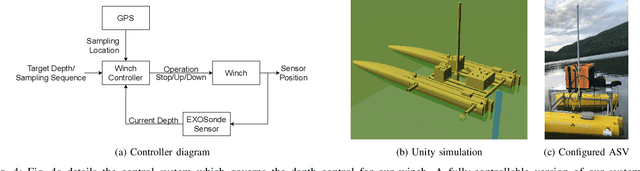
This paper presents the portable autonomous probing system (APS), a low-cost robotic design for collecting water quality measurements at targeted depths from an autonomous surface vehicle (ASV). This system fills an important but often overlooked niche in marine sampling by enabling mobile sensor observations throughout the near-surface water column without the need for advanced underwater equipment. We present a probe delivery mechanism built with commercially available components and describe the corresponding open-source simulator and winch controller. Finally, we demonstrate the system in a field deployment and discuss design trade-offs and areas for future improvement. Project details are available on https://johannah.github.io/publication/sample-at-depth our website