 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAO-Grasp: Articulated Object Grasp Generation
Oct 24, 2023



We introduce AO-Grasp, a grasp proposal method that generates stable and actionable 6 degree-of-freedom grasps for articulated objects. Our generated grasps enable robots to interact with articulated objects, such as opening and closing cabinets and appliances. Given a segmented partial point cloud of a single articulated object, AO-Grasp predicts the best grasp points on the object with a novel Actionable Grasp Point Predictor model and then finds corresponding grasp orientations for each point by leveraging a state-of-the-art rigid object grasping method. We train AO-Grasp on our new AO-Grasp Dataset, which contains 48K actionable parallel-jaw grasps on synthetic articulated objects. In simulation, AO-Grasp achieves higher grasp success rates than existing rigid object grasping and articulated object interaction baselines on both train and test categories. Additionally, we evaluate AO-Grasp on 120 realworld scenes of objects with varied geometries, articulation axes, and joint states, where AO-Grasp produces successful grasps on 67.5% of scenes, while the baseline only produces successful grasps on 33.3% of scenes.
Novel Modelling Strategies for High-frequency Stock Trading Data
Nov 30, 2022Full electronic automation in stock exchanges has recently become popular, generating high-frequency intraday data and motivating the development of near real-time price forecasting methods. Machine learning algorithms are widely applied to mid-price stock predictions. Processing raw data as inputs for prediction models (e.g., data thinning and feature engineering) can primarily affect the performance of the prediction methods. However, researchers rarely discuss this topic. This motivated us to propose three novel modelling strategies for processing raw data. We illustrate how our novel modelling strategies improve forecasting performance by analyzing high-frequency data of the Dow Jones 30 component stocks. In these experiments, our strategies often lead to statistically significant improvement in predictions. The three strategies improve the F1 scores of the SVM models by 0.056, 0.087, and 0.016, respectively.
An Autonomous Probing System for Collecting Measurements at Depth from Small Surface Vehicles
Oct 27, 2021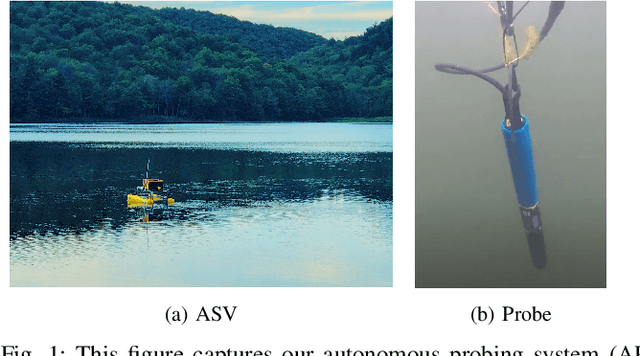
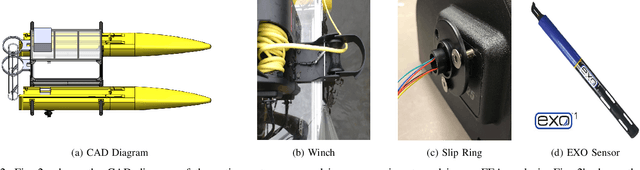
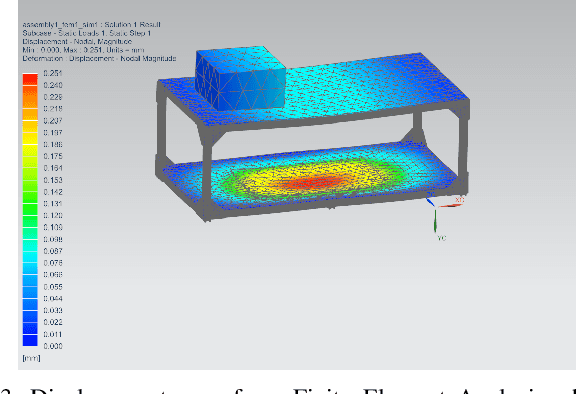
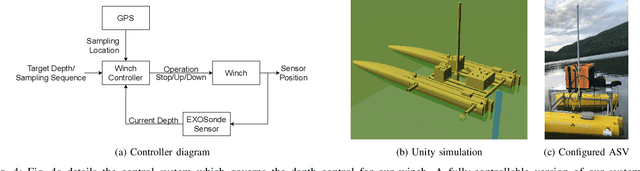
This paper presents the portable autonomous probing system (APS), a low-cost robotic design for collecting water quality measurements at targeted depths from an autonomous surface vehicle (ASV). This system fills an important but often overlooked niche in marine sampling by enabling mobile sensor observations throughout the near-surface water column without the need for advanced underwater equipment. We present a probe delivery mechanism built with commercially available components and describe the corresponding open-source simulator and winch controller. Finally, we demonstrate the system in a field deployment and discuss design trade-offs and areas for future improvement. Project details are available on https://johannah.github.io/publication/sample-at-depth our website