 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeODYSSEE: Oyster Detection Yielded by Sensor Systems on Edge Electronics
Sep 11, 2024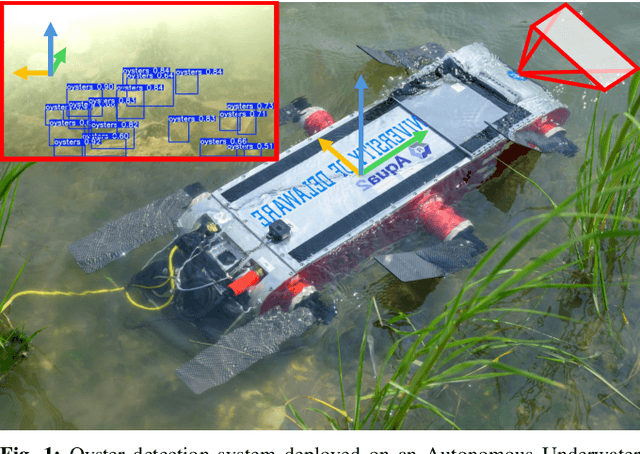
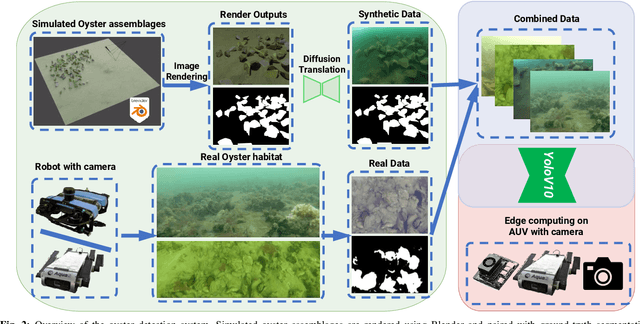
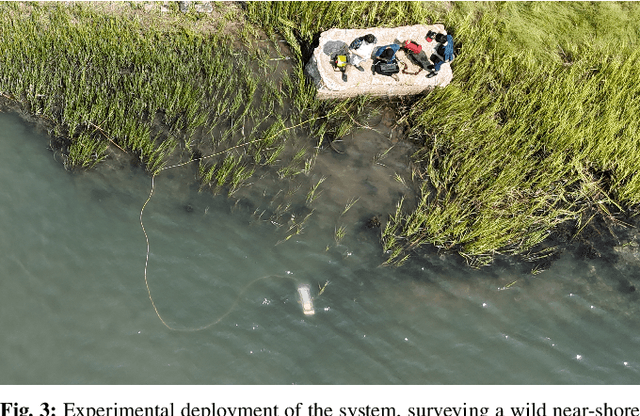
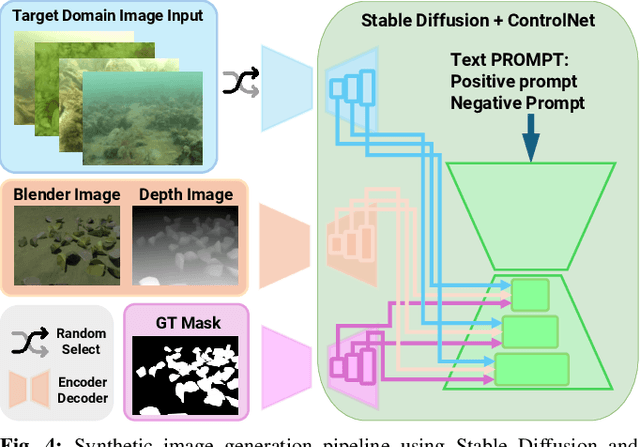
Oysters are a keystone species in coastal ecosystems, offering significant economic, environmental, and cultural benefits. However, current monitoring systems are often destructive, typically involving dredging to physically collect and count oysters. A nondestructive alternative is manual identification from video footage collected by divers, which is time-consuming and labor-intensive with expert input. An alternative to human monitoring is the deployment of a system with trained object detection models that performs real-time, on edge oyster detection in the field. One such platform is the Aqua2 robot. Effective training of these models requires extensive high-quality data, which is difficult to obtain in marine settings. To address these complications, we introduce a novel method that leverages stable diffusion to generate high-quality synthetic data for the marine domain. We exploit diffusion models to create photorealistic marine imagery, using ControlNet inputs to ensure consistency with the segmentation ground-truth mask, the geometry of the scene, and the target domain of real underwater images for oysters. The resulting dataset is used to train a YOLOv10-based vision model, achieving a state-of-the-art 0.657 mAP@50 for oyster detection on the Aqua2 platform. The system we introduce not only improves oyster habitat monitoring, but also paves the way to autonomous surveillance for various tasks in marine contexts, improving aquaculture and conservation efforts.
An Autonomous Probing System for Collecting Measurements at Depth from Small Surface Vehicles
Oct 27, 2021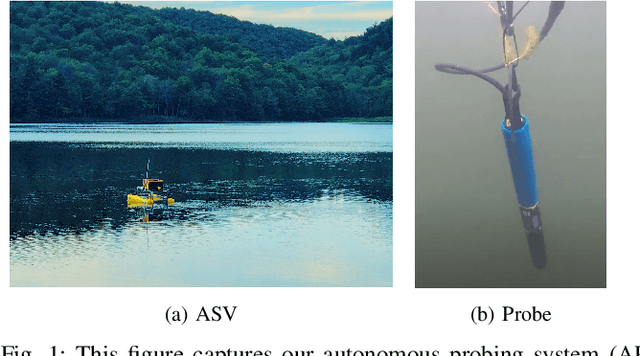
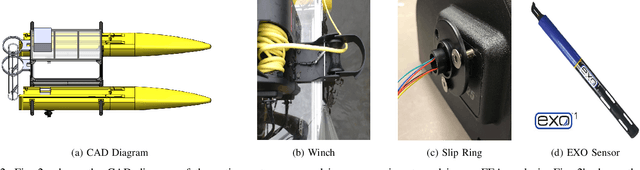
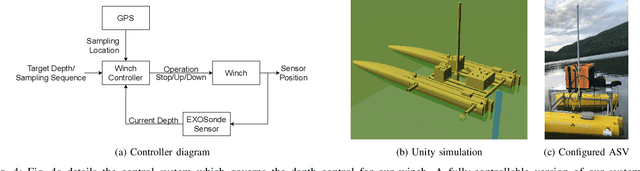
This paper presents the portable autonomous probing system (APS), a low-cost robotic design for collecting water quality measurements at targeted depths from an autonomous surface vehicle (ASV). This system fills an important but often overlooked niche in marine sampling by enabling mobile sensor observations throughout the near-surface water column without the need for advanced underwater equipment. We present a probe delivery mechanism built with commercially available components and describe the corresponding open-source simulator and winch controller. Finally, we demonstrate the system in a field deployment and discuss design trade-offs and areas for future improvement. Project details are available on https://johannah.github.io/publication/sample-at-depth our website