 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultimodal Safety Evaluation in Generative Agent Social Simulations
Oct 09, 2025



Can generative agents be trusted in multimodal environments? Despite advances in large language and vision-language models that enable agents to act autonomously and pursue goals in rich settings, their ability to reason about safety, coherence, and trust across modalities remains limited. We introduce a reproducible simulation framework for evaluating agents along three dimensions: (1) safety improvement over time, including iterative plan revisions in text-visual scenarios; (2) detection of unsafe activities across multiple categories of social situations; and (3) social dynamics, measured as interaction counts and acceptance ratios of social exchanges. Agents are equipped with layered memory, dynamic planning, multimodal perception, and are instrumented with SocialMetrics, a suite of behavioral and structural metrics that quantifies plan revisions, unsafe-to-safe conversions, and information diffusion across networks. Experiments show that while agents can detect direct multimodal contradictions, they often fail to align local revisions with global safety, reaching only a 55 percent success rate in correcting unsafe plans. Across eight simulation runs with three models - Claude, GPT-4o mini, and Qwen-VL - five agents achieved average unsafe-to-safe conversion rates of 75, 55, and 58 percent, respectively. Overall performance ranged from 20 percent in multi-risk scenarios with GPT-4o mini to 98 percent in localized contexts such as fire/heat with Claude. Notably, 45 percent of unsafe actions were accepted when paired with misleading visuals, showing a strong tendency to overtrust images. These findings expose critical limitations in current architectures and provide a reproducible platform for studying multimodal safety, coherence, and social dynamics.
Adapting Biological Reflexes for Dynamic Reorientation in Space Manipulator Systems
Aug 19, 2025Robotic arms mounted on spacecraft, known as space manipulator systems (SMSs), are critical for enabling on-orbit assembly, satellite servicing, and debris removal. However, controlling these systems in microgravity remains a significant challenge due to the dynamic coupling between the manipulator and the spacecraft base. This study explores the potential of using biological inspiration to address this issue, focusing on animals, particularly lizards, that exhibit mid-air righting reflexes. Based on similarities between SMSs and these animals in terms of behavior, morphology, and environment, their air-righting motion trajectories are extracted from high-speed video recordings using computer vision techniques. These trajectories are analyzed within a multi-objective optimization framework to identify the key behavioral goals and assess their relative importance. The resulting motion profiles are then applied as reference trajectories for SMS control, with baseline controllers used to track them. The findings provide a step toward translating evolved animal behaviors into interpretable, adaptive control strategies for space robotics, with implications for improving maneuverability and robustness in future missions.
Is AI currently capable of identifying wild oysters? A comparison of human annotators against the AI model, ODYSSEE
May 06, 2025Oysters are ecologically and commercially important species that require frequent monitoring to track population demographics (e.g. abundance, growth, mortality). Current methods of monitoring oyster reefs often require destructive sampling methods and extensive manual effort. Therefore, they are suboptimal for small-scale or sensitive environments. A recent alternative, the ODYSSEE model, was developed to use deep learning techniques to identify live oysters using video or images taken in the field of oyster reefs to assess abundance. The validity of this model in identifying live oysters on a reef was compared to expert and non-expert annotators. In addition, we identified potential sources of prediction error. Although the model can make inferences significantly faster than expert and non-expert annotators (39.6 s, $2.34 \pm 0.61$ h, $4.50 \pm 1.46$ h, respectively), the model overpredicted the number of live oysters, achieving lower accuracy (63\%) in identifying live oysters compared to experts (74\%) and non-experts (75\%) alike. Image quality was an important factor in determining the accuracy of the model and the annotators. Better quality images improved human accuracy and worsened model accuracy. Although ODYSSEE was not sufficiently accurate, we anticipate that future training on higher-quality images, utilizing additional live imagery, and incorporating additional annotation training classes will greatly improve the model's predictive power based on the results of this analysis. Future research should address methods that improve the detection of living vs. dead oysters.
ODYSSEE: Oyster Detection Yielded by Sensor Systems on Edge Electronics
Sep 11, 2024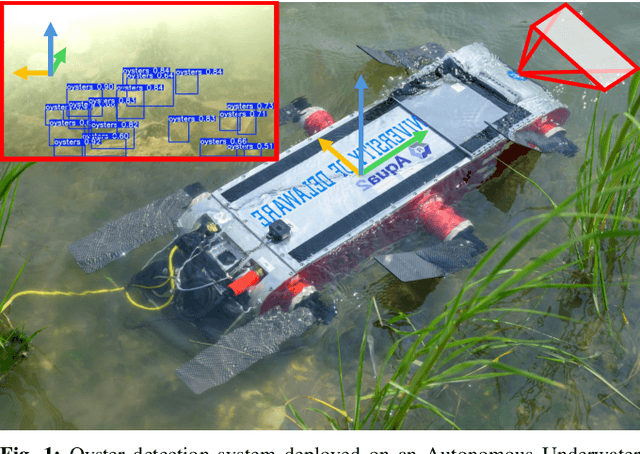
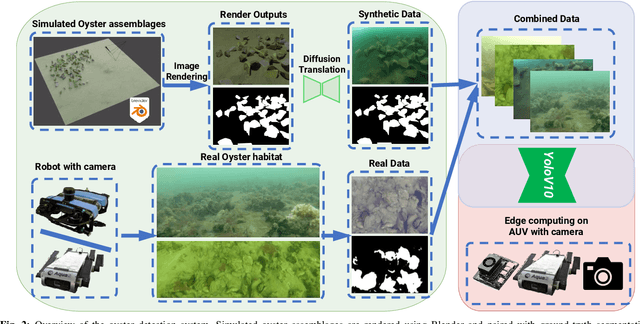
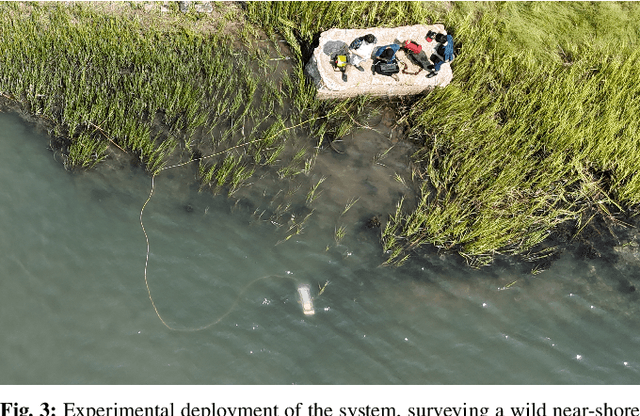
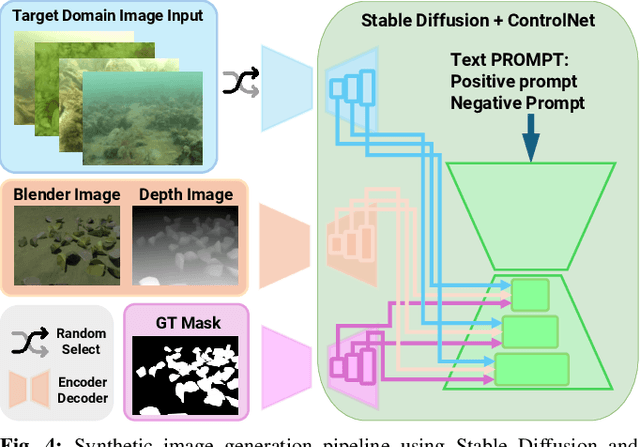
Oysters are a keystone species in coastal ecosystems, offering significant economic, environmental, and cultural benefits. However, current monitoring systems are often destructive, typically involving dredging to physically collect and count oysters. A nondestructive alternative is manual identification from video footage collected by divers, which is time-consuming and labor-intensive with expert input. An alternative to human monitoring is the deployment of a system with trained object detection models that performs real-time, on edge oyster detection in the field. One such platform is the Aqua2 robot. Effective training of these models requires extensive high-quality data, which is difficult to obtain in marine settings. To address these complications, we introduce a novel method that leverages stable diffusion to generate high-quality synthetic data for the marine domain. We exploit diffusion models to create photorealistic marine imagery, using ControlNet inputs to ensure consistency with the segmentation ground-truth mask, the geometry of the scene, and the target domain of real underwater images for oysters. The resulting dataset is used to train a YOLOv10-based vision model, achieving a state-of-the-art 0.657 mAP@50 for oyster detection on the Aqua2 platform. The system we introduce not only improves oyster habitat monitoring, but also paves the way to autonomous surveillance for various tasks in marine contexts, improving aquaculture and conservation efforts.