 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMARLAS: Multi Agent Reinforcement Learning for cooperated Adaptive Sampling
Paper and Code
Jul 15, 2022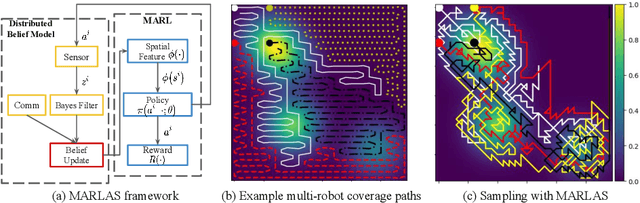
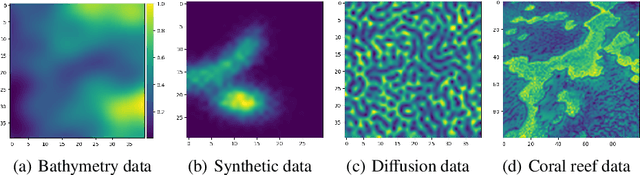
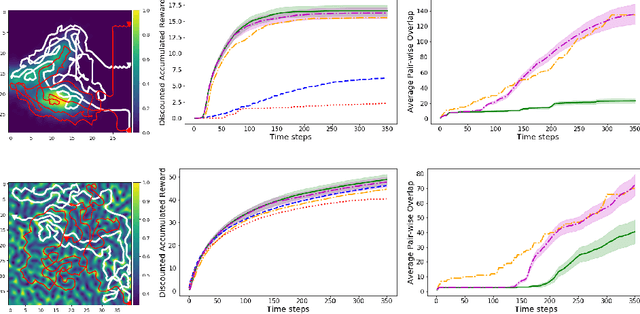
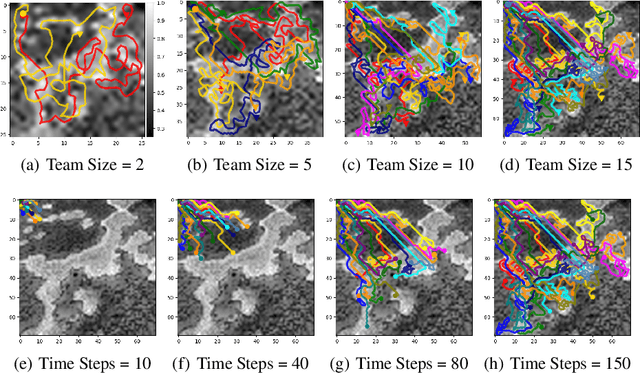
The multi-robot adaptive sampling problem aims at finding trajectories for a team of robots to efficiently sample the phenomenon of interest within a given endurance budget of the robots. In this paper, we propose a robust and scalable approach using decentralized Multi-Agent Reinforcement Learning for cooperated Adaptive Sampling (MARLAS) of quasi-static environmental processes. Given a prior on the field being sampled, the proposed method learns decentralized policies for a team of robots to sample high-utility regions within a fixed budget. The multi-robot adaptive sampling problem requires the robots to coordinate with each other to avoid overlapping sampling trajectories. Therefore, we encode the estimates of neighbor positions and intermittent communication between robots into the learning process. We evaluated MARLAS over multiple performance metrics and found it to outperform other baseline multi-robot sampling techniques. We further demonstrate robustness to communication failures and scalability with both the size of the robot team and the size of the region being sampled. The experimental evaluations are conducted both in simulations on real data and in real robot experiments on demo environmental setup.