 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInformative Path Planning with Guaranteed Estimation Uncertainty
Feb 05, 2026Environmental monitoring robots often need to reconstruct spatial fields (e.g., salinity, temperature, bathymetry) under tight distance and energy constraints. Classical boustrophedon lawnmower surveys provide geometric coverage guarantees but can waste effort by oversampling predictable regions. In contrast, informative path planning (IPP) methods leverage spatial correlations to reduce oversampling, yet typically offer no guarantees on reconstruction quality. This paper bridges these approaches by addressing informative path planning with guaranteed estimation uncertainty: computing the shortest path whose measurements ensure that the Gaussian-process (GP) posterior variance -- an intrinsic uncertainty measure that lower-bounds the mean-squared prediction error under the GP model -- falls below a user-specified threshold over the monitoring region. We propose a three-stage approach: (i) learn a GP model from available prior information; (ii) transform the learned GP kernel into binary coverage maps for each candidate sensing location, indicating which locations' uncertainty can be reduced below a specified target; and (iii) plan a near-shortest route whose combined coverage satisfies the global uncertainty constraint. To address heterogeneous phenomena, we incorporate a nonstationary kernel that captures spatially varying correlation structure, and we accommodate non-convex environments with obstacles. Algorithmically, we present methods with provable approximation guarantees for sensing-location selection and for the joint selection-and-routing problem under a travel budget. Experiments on real-world topographic data show that our planners meet the uncertainty target using fewer sensing locations and shorter travel distances than a recent baseline, and field experiments with bathymetry-mapping autonomous surface and underwater vehicles demonstrate real-world feasibility.
Online Multi-Robot Coordination and Cooperation with Task Precedence Relationships
Sep 18, 2025



We propose a new formulation for the multi-robot task allocation problem that incorporates (a) complex precedence relationships between tasks, (b) efficient intra-task coordination, and (c) cooperation through the formation of robot coalitions. A task graph specifies the tasks and their relationships, and a set of reward functions models the effects of coalition size and preceding task performance. Maximizing task rewards is NP-hard; hence, we propose network flow-based algorithms to approximate solutions efficiently. A novel online algorithm performs iterative re-allocation, providing robustness to task failures and model inaccuracies to achieve higher performance than offline approaches. We comprehensively evaluate the algorithms in a testbed with random missions and reward functions and compare them to a mixed-integer solver and a greedy heuristic. Additionally, we validate the overall approach in an advanced simulator, modeling reward functions based on realistic physical phenomena and executing the tasks with realistic robot dynamics. Results establish efficacy in modeling complex missions and efficiency in generating high-fidelity task plans while leveraging task relationships.
Generalizability of Graph Neural Networks for Decentralized Unlabeled Motion Planning
Sep 29, 2024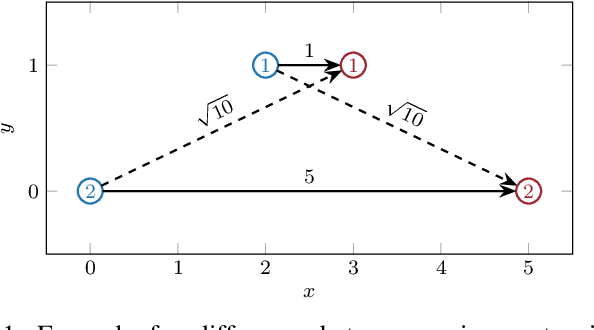
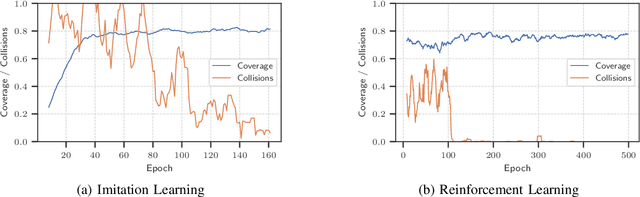

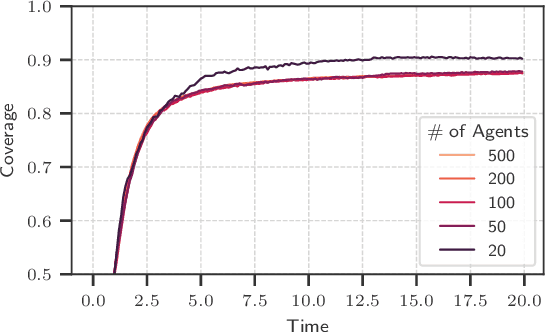
Unlabeled motion planning involves assigning a set of robots to target locations while ensuring collision avoidance, aiming to minimize the total distance traveled. The problem forms an essential building block for multi-robot systems in applications such as exploration, surveillance, and transportation. We address this problem in a decentralized setting where each robot knows only the positions of its $k$-nearest robots and $k$-nearest targets. This scenario combines elements of combinatorial assignment and continuous-space motion planning, posing significant scalability challenges for traditional centralized approaches. To overcome these challenges, we propose a decentralized policy learned via a Graph Neural Network (GNN). The GNN enables robots to determine (1) what information to communicate to neighbors and (2) how to integrate received information with local observations for decision-making. We train the GNN using imitation learning with the centralized Hungarian algorithm as the expert policy, and further fine-tune it using reinforcement learning to avoid collisions and enhance performance. Extensive empirical evaluations demonstrate the scalability and effectiveness of our approach. The GNN policy trained on 100 robots generalizes to scenarios with up to 500 robots, outperforming state-of-the-art solutions by 8.6\% on average and significantly surpassing greedy decentralized methods. This work lays the foundation for solving multi-robot coordination problems in settings where scalability is important.
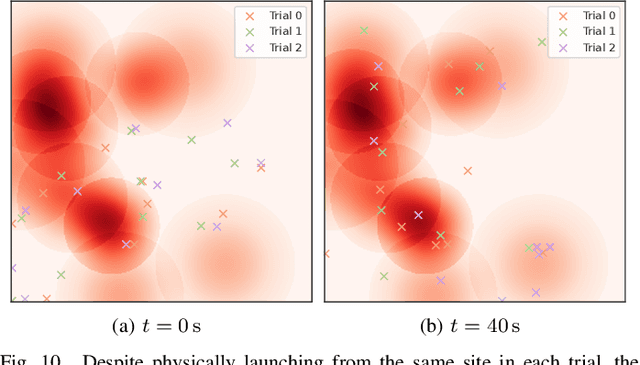
LPAC: Learnable Perception-Action-Communication Loops with Applications to Coverage Control
Jan 18, 2024Coverage control is the problem of navigating a robot swarm to collaboratively monitor features or a phenomenon of interest not known a priori. The problem is challenging in decentralized settings with robots that have limited communication and sensing capabilities. We propose a learnable Perception-Action-Communication (LPAC) architecture for the problem, wherein a convolution neural network (CNN) processes localized perception; a graph neural network (GNN) facilitates robot communications; finally, a shallow multi-layer perceptron (MLP) computes robot actions. The GNN enables collaboration in the robot swarm by computing what information to communicate with nearby robots and how to incorporate received information. Evaluations show that the LPAC models -- trained using imitation learning -- outperform standard decentralized and centralized coverage control algorithms. The learned policy generalizes to environments different from the training dataset, transfers to larger environments with more robots, and is robust to noisy position estimates. The results indicate the suitability of LPAC architectures for decentralized navigation in robot swarms to achieve collaborative behavior.
Asynchronous Perception-Action-Communication with Graph Neural Networks
Sep 18, 2023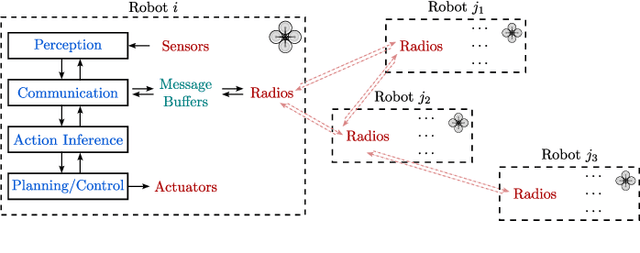
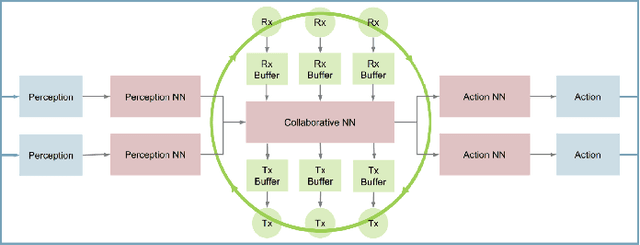
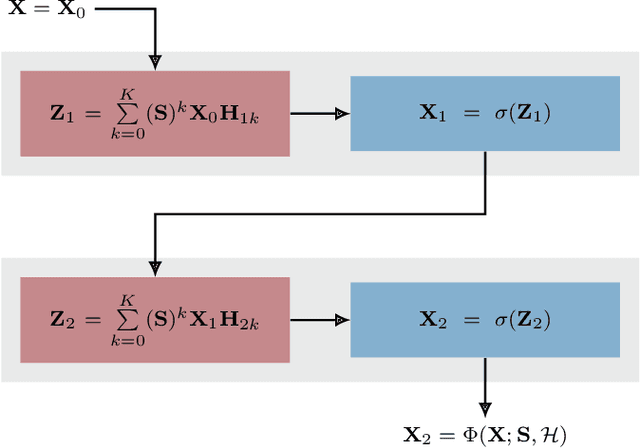
Collaboration in large robot swarms to achieve a common global objective is a challenging problem in large environments due to limited sensing and communication capabilities. The robots must execute a Perception-Action-Communication (PAC) loop -- they perceive their local environment, communicate with other robots, and take actions in real time. A fundamental challenge in decentralized PAC systems is to decide what information to communicate with the neighboring robots and how to take actions while utilizing the information shared by the neighbors. Recently, this has been addressed using Graph Neural Networks (GNNs) for applications such as flocking and coverage control. Although conceptually, GNN policies are fully decentralized, the evaluation and deployment of such policies have primarily remained centralized or restrictively decentralized. Furthermore, existing frameworks assume sequential execution of perception and action inference, which is very restrictive in real-world applications. This paper proposes a framework for asynchronous PAC in robot swarms, where decentralized GNNs are used to compute navigation actions and generate messages for communication. In particular, we use aggregated GNNs, which enable the exchange of hidden layer information between robots for computational efficiency and decentralized inference of actions. Furthermore, the modules in the framework are asynchronous, allowing robots to perform sensing, extracting information, communication, action inference, and control execution at different frequencies. We demonstrate the effectiveness of GNNs executed in the proposed framework in navigating large robot swarms for collaborative coverage of large environments.
Reinforcement Learning for Agile Active Target Sensing with a UAV
Dec 16, 2022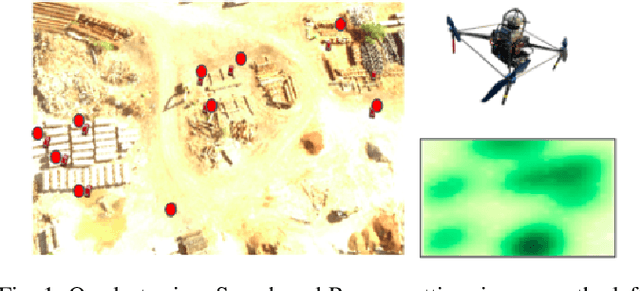
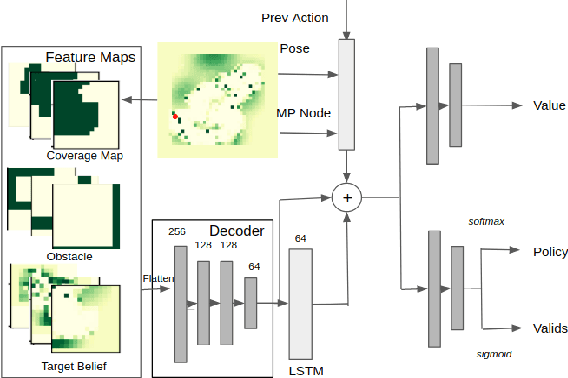
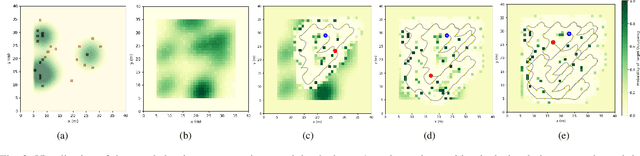
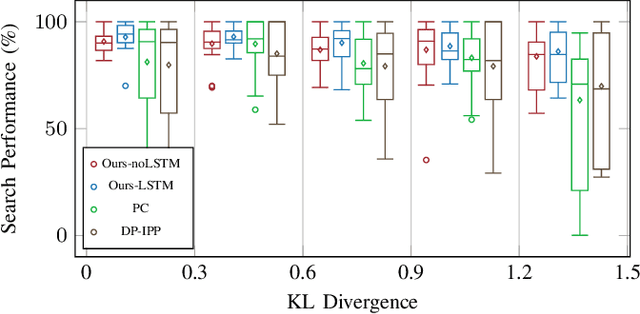
Active target sensing is the task of discovering and classifying an unknown number of targets in an environment and is critical in search-and-rescue missions. This paper develops a deep reinforcement learning approach to plan informative trajectories that increase the likelihood for an uncrewed aerial vehicle (UAV) to discover missing targets. Our approach efficiently (1) explores the environment to discover new targets, (2) exploits its current belief of the target states and incorporates inaccurate sensor models for high-fidelity classification, and (3) generates dynamically feasible trajectories for an agile UAV by employing a motion primitive library. Extensive simulations on randomly generated environments show that our approach is more efficient in discovering and classifying targets than several other baselines. A unique characteristic of our approach, in contrast to heuristic informative path planning approaches, is that it is robust to varying amounts of deviations of the prior belief from the true target distribution, thereby alleviating the challenge of designing heuristics specific to the application conditions.
Multi-Robot Coordination and Cooperation with Task Precedence Relationships
Sep 28, 2022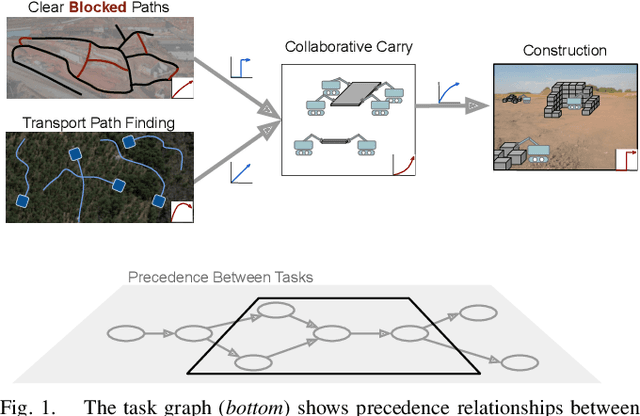

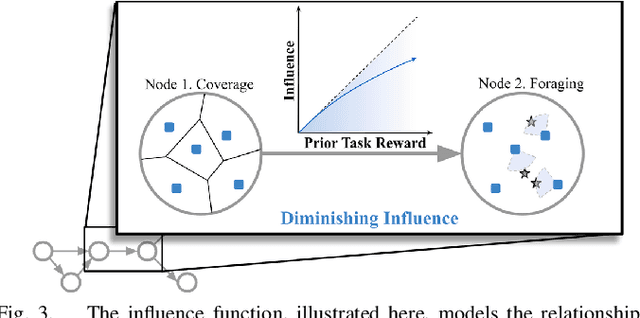
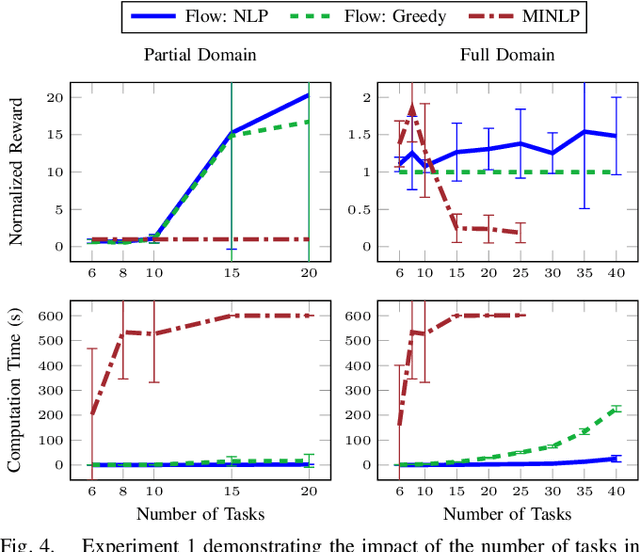
We propose a new formulation for the multi-robot task planning and allocation problem that incorporates (a) precedence relationships between tasks; (b) coordination for tasks allowing multiple robots to achieve increased efficiency; and (c) cooperation through the formation of robot coalitions for tasks that cannot be performed by individual robots alone. In our formulation, the tasks and the relationships between the tasks are specified by a task graph. We define a set of reward functions over the task graph's nodes and edges. These functions model the effect of robot coalition size on the task performance, and incorporate the influence of one task's performance on a dependent task. Solving this problem optimally is NP-hard. However, using the task graph formulation allows us to leverage min-cost network flow approaches to obtain approximate solutions efficiently. Additionally, we explore a mixed integer programming approach, which gives optimal solutions for small instances of the problem but is computationally expensive. We also develop a greedy heuristic algorithm as a baseline. Our modeling and solution approaches result in task plans that leverage task precedence relationships and robot coordination and cooperation to achieve high mission performance, even in large missions with many agents.
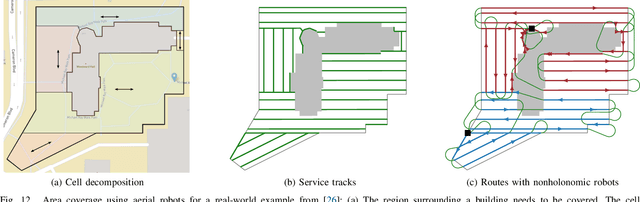
Area Coverage with Multiple Capacity-Constrained Robots
Aug 21, 2022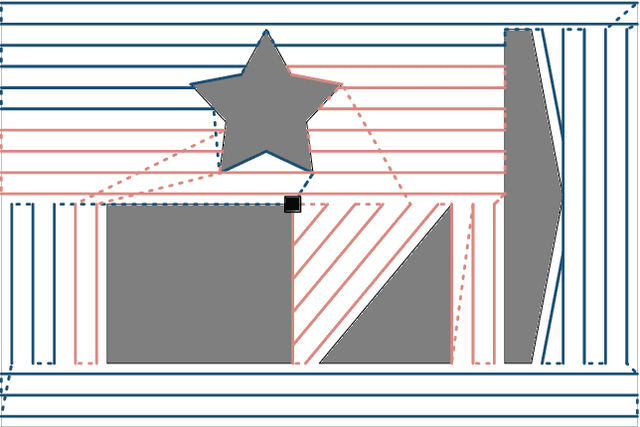
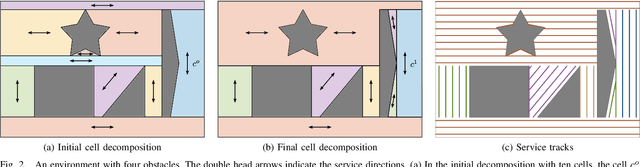
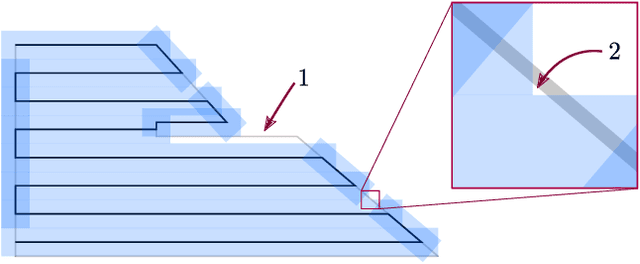
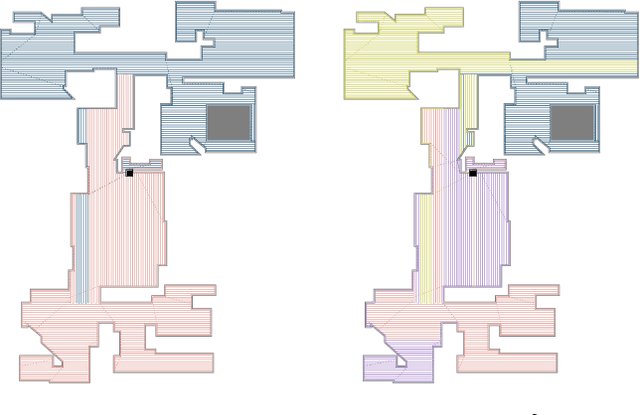
The area coverage problem is the task of efficiently servicing a given two-dimensional surface using sensors mounted on robots such as unmanned aerial vehicles (UAVs) and unmanned ground vehicles (UGVs). We present a novel formulation for generating coverage routes for multiple capacity-constrained robots, where capacity can be specified in terms of battery life or flight time. Traversing the environment incurs demands on the robot resources, which have capacity limits. The central aspect of our approach is transforming the area coverage problem into a line coverage problem (i.e., coverage of linear features), and then generating routes that minimize the total cost of travel while respecting the capacity constraints. We define two modes of travel: (1) servicing and (2) deadheading, which correspond to whether a robot is performing task-specific actions or not. Our formulation allows separate and asymmetric travel costs and demands for the two modes. Furthermore, the cells computed from cell decomposition, aimed at minimizing the number of turns, are not required to be monotone polygons. We develop new procedures for cell decomposition and generation of service tracks that can handle non-monotone polygons with or without holes. We establish the efficacy of our algorithm on a ground robot dataset with 25 indoor environments and an aerial robot dataset with 300 outdoor environments. The algorithm generates solutions whose costs are 10% lower on average than state-of-the-art methods. We additionally demonstrate our algorithm in experiments with UAVs.
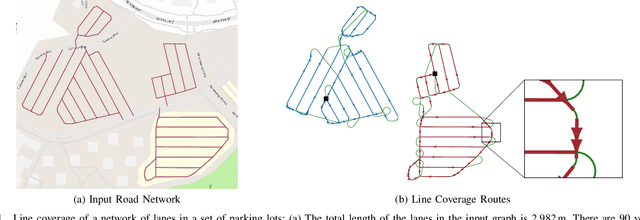
The Single Robot Line Coverage Problem: Theory, Algorithms and Experiments
Aug 21, 2022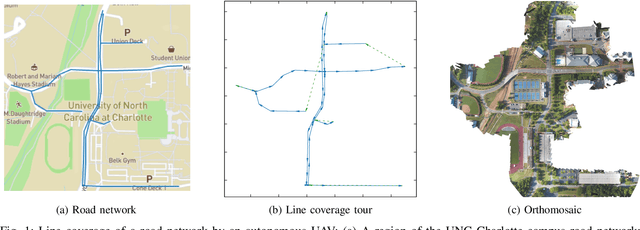
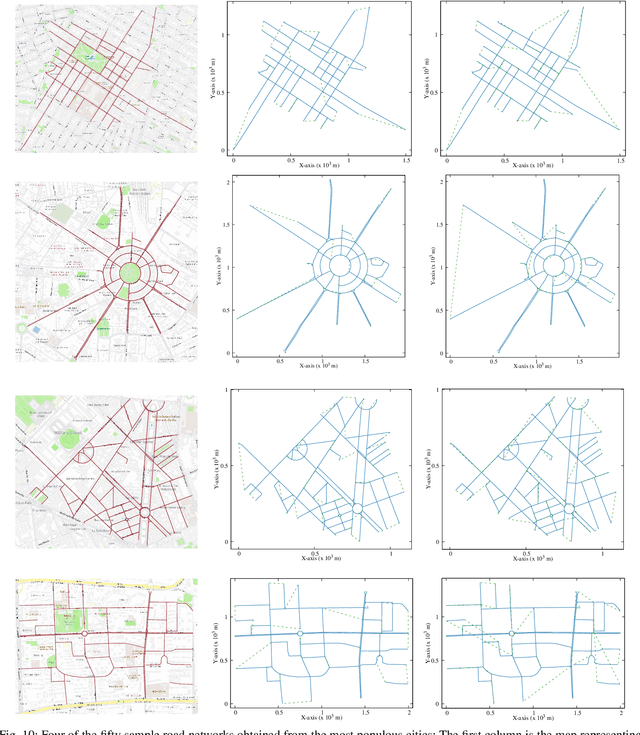
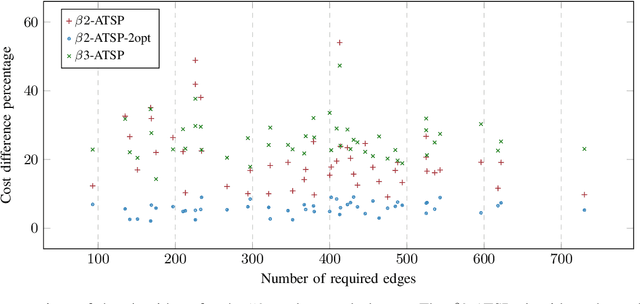
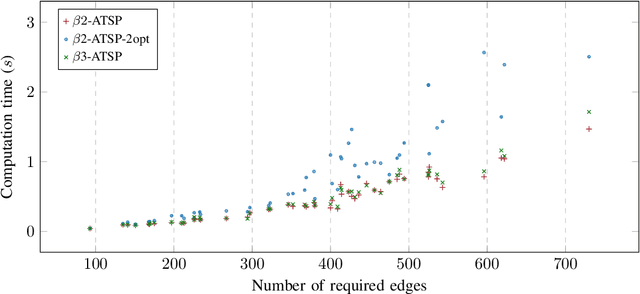
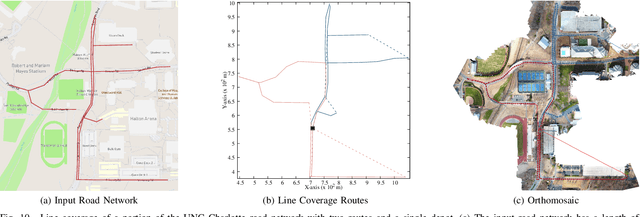
Line coverage is the task of servicing a given set of one-dimensional features in an environment. It is important for the inspection of linear infrastructure such as road networks, power lines, and oil and gas pipelines. This paper addresses the single robot line coverage problem for aerial and ground robots by modeling it as an optimization problem on a graph. The problem belongs to the broad class of arc routing problems and is closely related to the asymmetric rural postman problem (RPP). The paper presents an integer linear programming formulation with proof of correctness. Using the minimum cost flow problem, we develop approximation algorithms with guarantees on the solution quality. These guarantees also improve the existing results for the asymmetric RPP. The main algorithm partitions the problem into three cases based on the structure of the required graph, i.e., the graph induced by the features that require servicing. We evaluate our algorithms on road networks from the 50 most populous cities in the world. The algorithms, augmented with improvement heuristics, run within 3s and generate solutions that are within 10% of the optimum. We experimentally demonstrate our algorithms with commercial UAVs on the UNC Charlotte campus road network.
Line Coverage with Multiple Robots: Algorithms and Experiments
Aug 19, 2022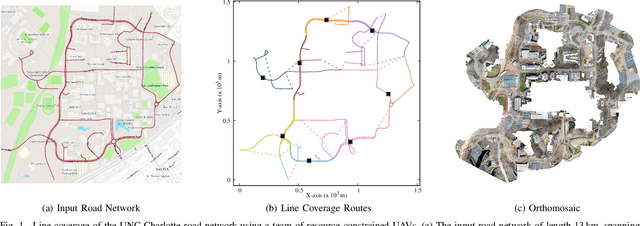
The line coverage problem is to find efficient routes for coverage of linear features by one or more resource-constrained robots. Linear features model environments such as road networks, power lines, and oil and gas pipelines. We define two modes of travel for the robots: servicing and deadheading. A robot services a feature if it performs task-specific actions, e.g., taking images, as it traverses the feature; otherwise, it is deadheading. Traversing the environment incurs costs (e.g., travel time) and demands on resources (e.g., battery life). Servicing and deadheading can have different cost and demand functions, and we further permit them to be direction-dependent. We model the environment as a graph and provide an integer linear program. As the problem is NP-hard, we develop a fast and efficient heuristic algorithm, Merge-Embed-Merge (MEM). The constructive property of the algorithm enables solving the multi-depot version for large graphs. We further extend the MEM algorithm to handle turning costs and nonholonomic constraints. We benchmark the algorithm on a dataset of 50 road networks and demonstrate the algorithm in experiments using aerial robots on road networks.