 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Correlated Arc Orienteering Problem
Paper and Code
Aug 16, 2022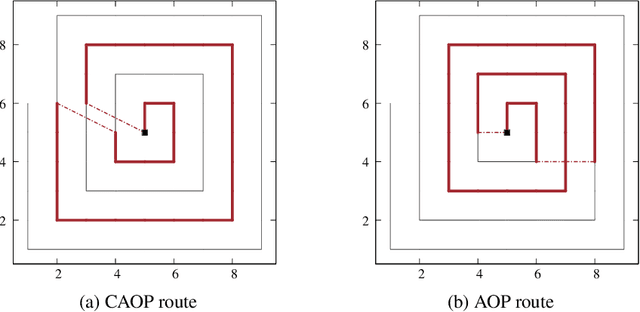
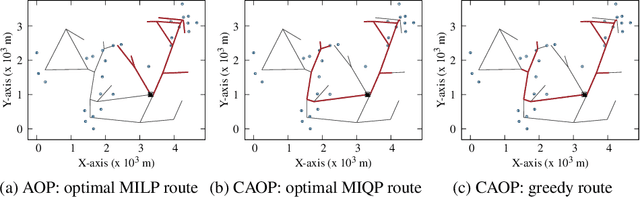
This paper introduces the correlated arc orienteering problem (CAOP), where the task is to find routes for a team of robots to maximize the collection of rewards associated with features in the environment. These features can be one-dimensional or points in the environment, and can have spatial correlation, i.e., visiting a feature in the environment may provide a portion of the reward associated with a correlated feature. A robot incurs costs as it traverses the environment, and the total cost for its route is limited by a resource constraint such as battery life or operation time. As environments are often large, we permit multiple depots where the robots must start and end their routes. The CAOP generalizes the correlated orienteering problem (COP), where the rewards are only associated with point features, and the arc orienteering problem (AOP), where the rewards are not spatially correlated. We formulate a mixed integer quadratic program (MIQP) that formalizes the problem and gives optimal solutions. However, the problem is NP-hard, and therefore we develop an efficient greedy constructive algorithm. We illustrate the problem with two different applications: informative path planning for methane gas leak detection and coverage of road networks.