 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning for Agile Active Target Sensing with a UAV
Dec 16, 2022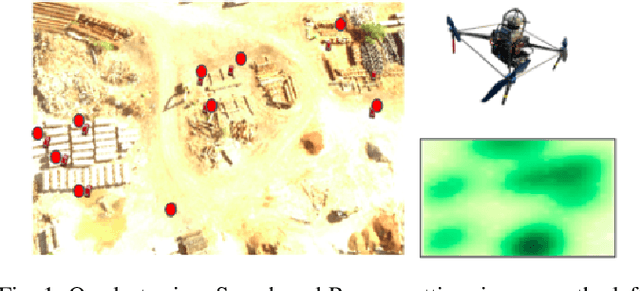
Active target sensing is the task of discovering and classifying an unknown number of targets in an environment and is critical in search-and-rescue missions. This paper develops a deep reinforcement learning approach to plan informative trajectories that increase the likelihood for an uncrewed aerial vehicle (UAV) to discover missing targets. Our approach efficiently (1) explores the environment to discover new targets, (2) exploits its current belief of the target states and incorporates inaccurate sensor models for high-fidelity classification, and (3) generates dynamically feasible trajectories for an agile UAV by employing a motion primitive library. Extensive simulations on randomly generated environments show that our approach is more efficient in discovering and classifying targets than several other baselines. A unique characteristic of our approach, in contrast to heuristic informative path planning approaches, is that it is robust to varying amounts of deviations of the prior belief from the true target distribution, thereby alleviating the challenge of designing heuristics specific to the application conditions.