 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Multi-Robot Coordination and Cooperation with Task Precedence Relationships
Sep 18, 2025



We propose a new formulation for the multi-robot task allocation problem that incorporates (a) complex precedence relationships between tasks, (b) efficient intra-task coordination, and (c) cooperation through the formation of robot coalitions. A task graph specifies the tasks and their relationships, and a set of reward functions models the effects of coalition size and preceding task performance. Maximizing task rewards is NP-hard; hence, we propose network flow-based algorithms to approximate solutions efficiently. A novel online algorithm performs iterative re-allocation, providing robustness to task failures and model inaccuracies to achieve higher performance than offline approaches. We comprehensively evaluate the algorithms in a testbed with random missions and reward functions and compare them to a mixed-integer solver and a greedy heuristic. Additionally, we validate the overall approach in an advanced simulator, modeling reward functions based on realistic physical phenomena and executing the tasks with realistic robot dynamics. Results establish efficacy in modeling complex missions and efficiency in generating high-fidelity task plans while leveraging task relationships.
LPAC: Learnable Perception-Action-Communication Loops with Applications to Coverage Control
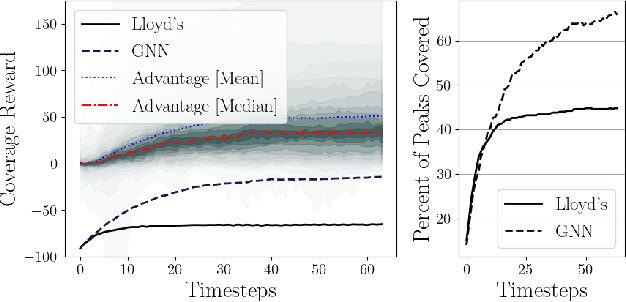
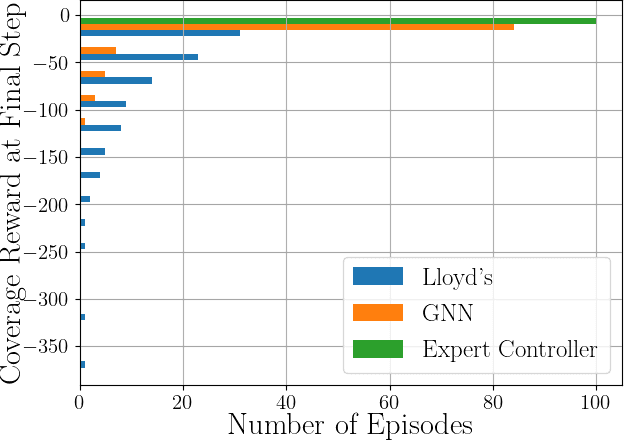
Jan 18, 2024Coverage control is the problem of navigating a robot swarm to collaboratively monitor features or a phenomenon of interest not known a priori. The problem is challenging in decentralized settings with robots that have limited communication and sensing capabilities. We propose a learnable Perception-Action-Communication (LPAC) architecture for the problem, wherein a convolution neural network (CNN) processes localized perception; a graph neural network (GNN) facilitates robot communications; finally, a shallow multi-layer perceptron (MLP) computes robot actions. The GNN enables collaboration in the robot swarm by computing what information to communicate with nearby robots and how to incorporate received information. Evaluations show that the LPAC models -- trained using imitation learning -- outperform standard decentralized and centralized coverage control algorithms. The learned policy generalizes to environments different from the training dataset, transfers to larger environments with more robots, and is robust to noisy position estimates. The results indicate the suitability of LPAC architectures for decentralized navigation in robot swarms to achieve collaborative behavior.
Multi-Robot Coordination and Cooperation with Task Precedence Relationships
Sep 28, 2022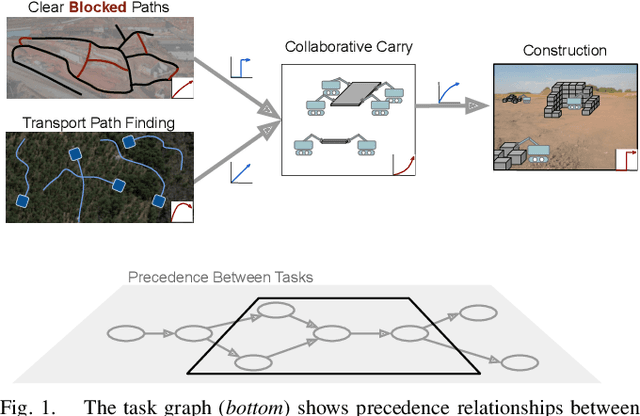

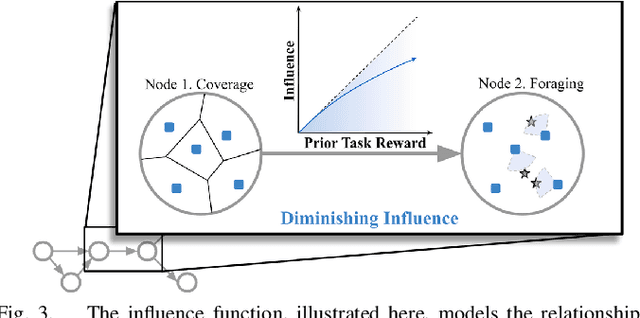
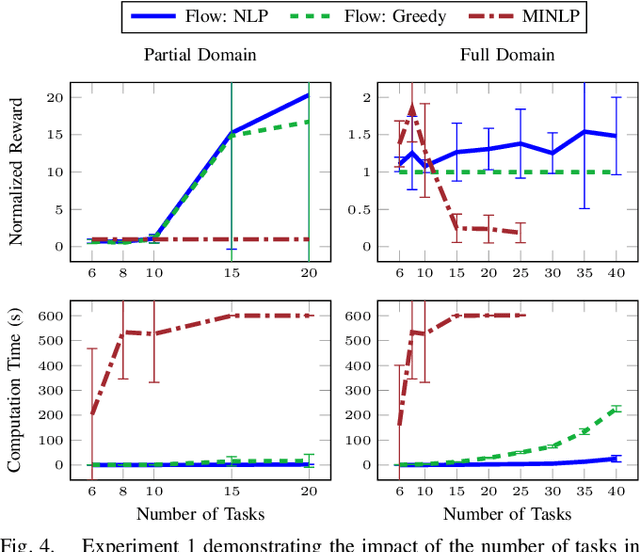
We propose a new formulation for the multi-robot task planning and allocation problem that incorporates (a) precedence relationships between tasks; (b) coordination for tasks allowing multiple robots to achieve increased efficiency; and (c) cooperation through the formation of robot coalitions for tasks that cannot be performed by individual robots alone. In our formulation, the tasks and the relationships between the tasks are specified by a task graph. We define a set of reward functions over the task graph's nodes and edges. These functions model the effect of robot coalition size on the task performance, and incorporate the influence of one task's performance on a dependent task. Solving this problem optimally is NP-hard. However, using the task graph formulation allows us to leverage min-cost network flow approaches to obtain approximate solutions efficiently. Additionally, we explore a mixed integer programming approach, which gives optimal solutions for small instances of the problem but is computationally expensive. We also develop a greedy heuristic algorithm as a baseline. Our modeling and solution approaches result in task plans that leverage task precedence relationships and robot coordination and cooperation to achieve high mission performance, even in large missions with many agents.
Coverage Control in Multi-Robot Systems via Graph Neural Networks
Sep 30, 2021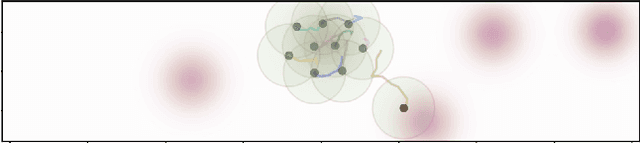
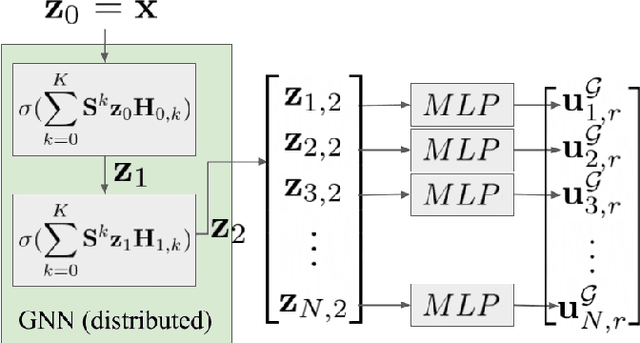
This paper develops a decentralized approach to mobile sensor coverage by a multi-robot system. We consider a scenario where a team of robots with limited sensing range must position itself to effectively detect events of interest in a region characterized by areas of varying importance. Towards this end, we develop a decentralized control policy for the robots -- realized via a Graph Neural Network -- which uses inter-robot communication to leverage non-local information for control decisions. By explicitly sharing information between multi-hop neighbors, the decentralized controller achieves a higher quality of coverage when compared to classical approaches that do not communicate and leverage only local information available to each robot. Simulated experiments demonstrate the efficacy of multi-hop communication for multi-robot coverage and evaluate the scalability and transferability of the learning-based controllers.