 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatial regularisation for improved accuracy and interpretability in keypoint-based registration
Mar 07, 2025Unsupervised registration strategies bypass requirements in ground truth transforms or segmentations by optimising similarity metrics between fixed and moved volumes. Among these methods, a recent subclass of approaches based on unsupervised keypoint detection stand out as very promising for interpretability. Specifically, these methods train a network to predict feature maps for fixed and moving images, from which explainable centres of mass are computed to obtain point clouds, that are then aligned in closed-form. However, the features returned by the network often yield spatially diffuse patterns that are hard to interpret, thus undermining the purpose of keypoint-based registration. Here, we propose a three-fold loss to regularise the spatial distribution of the features. First, we use the KL divergence to model features as point spread functions that we interpret as probabilistic keypoints. Then, we sharpen the spatial distributions of these features to increase the precision of the detected landmarks. Finally, we introduce a new repulsive loss across keypoints to encourage spatial diversity. Overall, our loss considerably improves the interpretability of the features, which now correspond to precise and anatomically meaningful landmarks. We demonstrate our three-fold loss in foetal rigid motion tracking and brain MRI affine registration tasks, where it not only outperforms state-of-the-art unsupervised strategies, but also bridges the gap with state-of-the-art supervised methods. Our code is available at https://github.com/BenBillot/spatial_regularisation.
LPAC: Learnable Perception-Action-Communication Loops with Applications to Coverage Control
Jan 18, 2024Coverage control is the problem of navigating a robot swarm to collaboratively monitor features or a phenomenon of interest not known a priori. The problem is challenging in decentralized settings with robots that have limited communication and sensing capabilities. We propose a learnable Perception-Action-Communication (LPAC) architecture for the problem, wherein a convolution neural network (CNN) processes localized perception; a graph neural network (GNN) facilitates robot communications; finally, a shallow multi-layer perceptron (MLP) computes robot actions. The GNN enables collaboration in the robot swarm by computing what information to communicate with nearby robots and how to incorporate received information. Evaluations show that the LPAC models -- trained using imitation learning -- outperform standard decentralized and centralized coverage control algorithms. The learned policy generalizes to environments different from the training dataset, transfers to larger environments with more robots, and is robust to noisy position estimates. The results indicate the suitability of LPAC architectures for decentralized navigation in robot swarms to achieve collaborative behavior.
MammoDL: Mammographic Breast Density Estimation using Federated Learning
Jun 11, 2022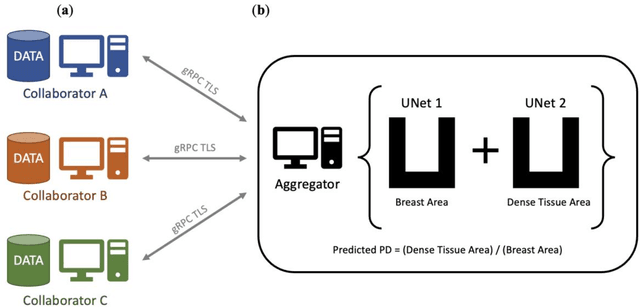
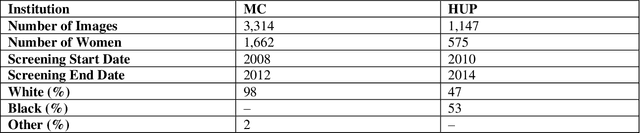
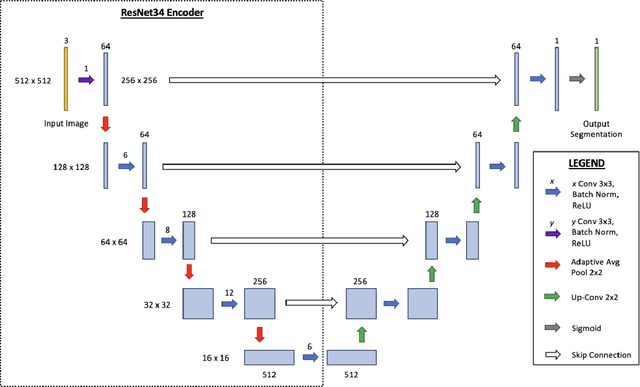

Assessing breast cancer risk from imaging remains a subjective process, in which radiologists employ computer aided detection (CAD) systems or qualitative visual assessment to estimate breast percent density (PD). More advanced machine learning (ML) models have become the most promising way to quantify breast cancer risk for early, accurate, and equitable diagnoses, but training such models in medical research is often restricted to small, single-institution data. Since patient demographics and imaging characteristics may vary considerably across imaging sites, models trained on single-institution data tend not to generalize well. In response to this problem, MammoDL is proposed, an open-source software tool that leverages UNet architecture to accurately estimate breast PD and complexity from digital mammography (DM). With the Open Federated Learning (OpenFL) library, this solution enables secure training on datasets across multiple institutions. MammoDL is a leaner, more flexible model than its predecessors, boasting improved generalization due to federation-enabled training on larger, more representative datasets.