 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommunication-Constrained Multi-Robot Exploration with Intermittent Rendezvous
Oct 02, 2023This paper deals with the Multi-robot Exploration (MRE) under communication constraints problem. We propose a novel intermittent rendezvous method that allows robots to explore an unknown environment while sharing maps at rendezvous locations through agreements. In our method, robots update the agreements to spread the rendezvous locations during the exploration and prioritize exploring unknown areas near them. To generate the agreements automatically, we reduced the MRE to instances of the Job Shop Scheduling Problem (JSSP) and ensured intermittent communication through a temporal connectivity graph. We evaluate our method in simulation in various virtual urban environments and a Gazebo simulation using the Robot Operating System (ROS). Our results suggest that our method can be better than using relays or maintaining intermittent communication with a base station since we can explore faster without additional hardware to create a relay network.
Scalable Multi-Robot System for Non-myopic Spatial Sampling
May 20, 2021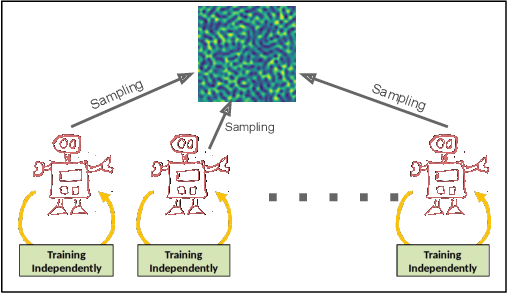
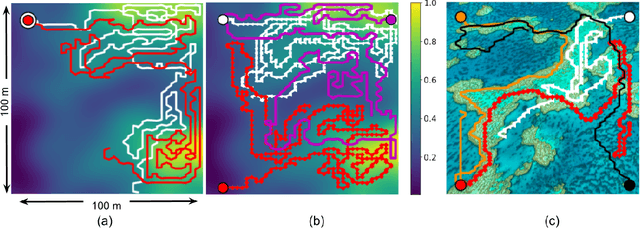
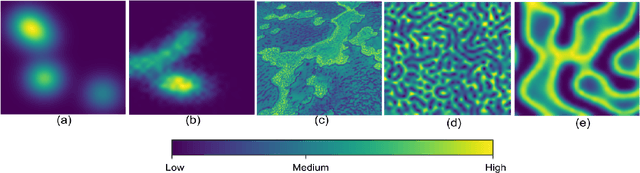
This paper presents a distributed scalable multi-robot planning algorithm for non-uniform sampling of quasi-static spatial fields. We address the problem of efficient data collection using multiple autonomous vehicles. In this paper, we are interested in analyzing the effect of communication between multiple robots, acting independently, on the overall sampling performance of the team. Our focus is on distributed sampling problem where the robots are operating independent of their teammates, but have the ability to communicate their states to other neighbors with a constraint on the communication range. We design and apply an informed non-myopic path planning technique on multiple robotic platforms to efficiently collect measurements from a spatial field. Our proposed approach is highly adaptive to challenging environments, growing team size, and runs in real-time, which are the key features for any real-world scenario. The results show that our distributed sampling approach is able to achieve efficient sampling with minimal communication between the robots. We evaluate our approach in simulation over multiple distributions commonly occurring in nature and on the real-world data collected during a field trial.