 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntermittent Rendezvous Plans with Mixed Integer Linear Program for Large-Scale Multi-Robot Exploration
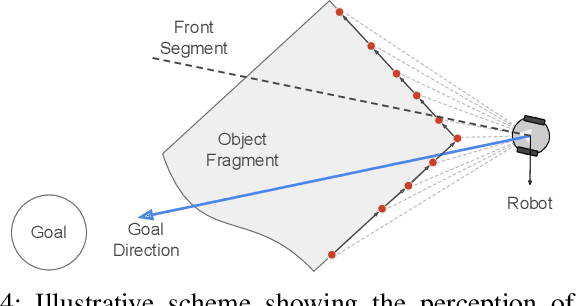
Nov 15, 2025Multi-Robot Exploration (MRE) systems with communication constraints have proven efficient in accomplishing a variety of tasks, including search-and-rescue, stealth, and military operations. While some works focus on opportunistic approaches for efficiency, others concentrate on pre-planned trajectories or scheduling for increased interpretability. However, scheduling usually requires knowledge of the environment beforehand, which prevents its deployment in several domains due to related uncertainties (e.g., underwater exploration). In our previous work, we proposed an intermittent communications framework for MRE under communication constraints that uses scheduled rendezvous events to mitigate such limitations. However, the system was unable to generate optimal plans and had no mechanisms to follow the plan considering realistic trajectories, which is not suited for real-world deployments. In this work, we further investigate the problem by formulating the Multi-Robot Exploration with Communication Constraints and Intermittent Connectivity (MRE-CCIC) problem. We propose a Mixed-Integer Linear Program (MILP) formulation to generate rendezvous plans and a policy to follow them based on the Rendezvous Tracking for Unknown Scenarios (RTUS) mechanism. The RTUS is a simple rule to allow robots to follow the assigned plan, considering unknown conditions. Finally, we evaluated our method in a large-scale environment configured in Gazebo simulations. The results suggest that our method can follow the plan promptly and accomplish the task efficiently. We provide an open-source implementation of both the MILP plan generator and the large-scale MRE-CCIC.
A Taxonomy of Collectible Card Games from a Game-Playing AI Perspective
Oct 08, 2024Collectible card games are challenging, widely played games that have received increasing attention from the AI research community in recent years. Despite important breakthroughs, the field still poses many unresolved challenges. This work aims to help further research on the genre by proposing a taxonomy of collectible card games by analyzing their rules, mechanics, and game modes from the perspective of game-playing AI research. To achieve this, we studied a set of popular games and provided a thorough discussion about their characteristics.
A Missing Data Imputation GAN for Character Sprite Generation
Sep 16, 2024

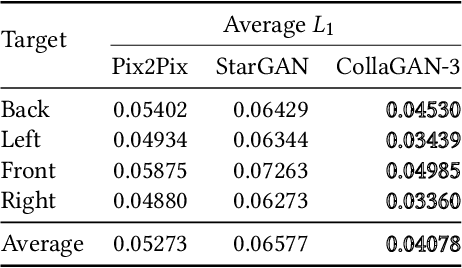
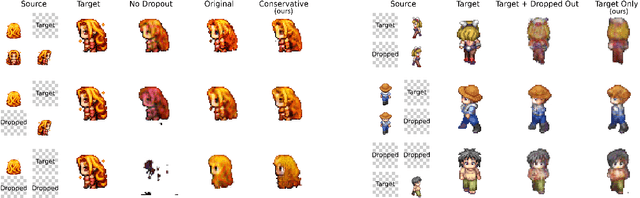
Creating and updating pixel art character sprites with many frames spanning different animations and poses takes time and can quickly become repetitive. However, that can be partially automated to allow artists to focus on more creative tasks. In this work, we concentrate on creating pixel art character sprites in a target pose from images of them facing other three directions. We present a novel approach to character generation by framing the problem as a missing data imputation task. Our proposed generative adversarial networks model receives the images of a character in all available domains and produces the image of the missing pose. We evaluated our approach in the scenarios with one, two, and three missing images, achieving similar or better results to the state-of-the-art when more images are available. We also evaluate the impact of the proposed changes to the base architecture.
Communication-Constrained Multi-Robot Exploration with Intermittent Rendezvous
Oct 02, 2023This paper deals with the Multi-robot Exploration (MRE) under communication constraints problem. We propose a novel intermittent rendezvous method that allows robots to explore an unknown environment while sharing maps at rendezvous locations through agreements. In our method, robots update the agreements to spread the rendezvous locations during the exploration and prioritize exploring unknown areas near them. To generate the agreements automatically, we reduced the MRE to instances of the Job Shop Scheduling Problem (JSSP) and ensured intermittent communication through a temporal connectivity graph. We evaluate our method in simulation in various virtual urban environments and a Gazebo simulation using the Robot Operating System (ROS). Our results suggest that our method can be better than using relays or maintaining intermittent communication with a base station since we can explore faster without additional hardware to create a relay network.
Generating Pixel Art Character Sprites using GANs
Aug 15, 2022



Iterating on creating pixel art character sprite sheets is essential to the game development process. However, it can take a lot of effort until the final versions containing different poses and animation clips are achieved. This paper investigates using conditional generative adversarial networks to aid the designers in creating such sprite sheets. We propose an architecture based on Pix2Pix to generate images of characters facing a target side (e.g., right) given sprites of them in a source pose (e.g., front). Experiments with small pixel art datasets yielded promising results, resulting in models with varying degrees of generalization, sometimes capable of generating images very close to the ground truth. We analyze the results through visual inspection and quantitatively with FID.
Chemistry-Inspired Pattern Formation with Robotic Swarms
Jun 07, 2022



Self-organized emergent patterns can be widely seen in particle interactions producing complex structures such as chemical elements and molecules. Inspired by these interactions, this work presents a novel stochastic approach that allows a swarm of heterogeneous robots to create emergent patterns in a completely decentralized fashion and relying only on local information. Our approach consists of modeling the swarm configuration as a dynamic Gibbs Random Field (GRF) and setting constraints on the neighborhood system inspired by chemistry rules that dictate binding polarity between particles. Using the GRF model, we determine velocities for each robot, resulting in behaviors that lead to the creation of patterns or shapes. Simulated experiments show the versatility of the approach in producing a variety of patterns, and experiments with a group of physical robots show the feasibility in potential applications.
HeRo 2.0: A Low-Cost Robot for Swarm Robotics Research
Mar 04, 2022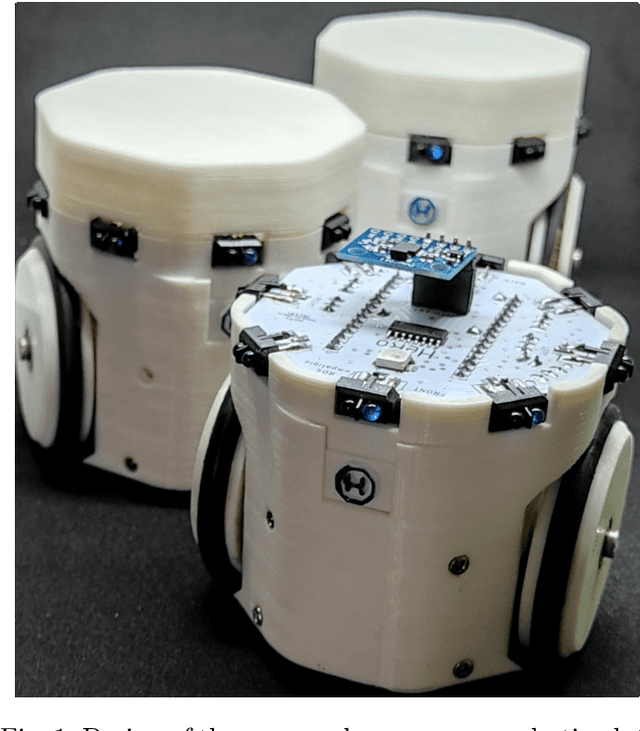
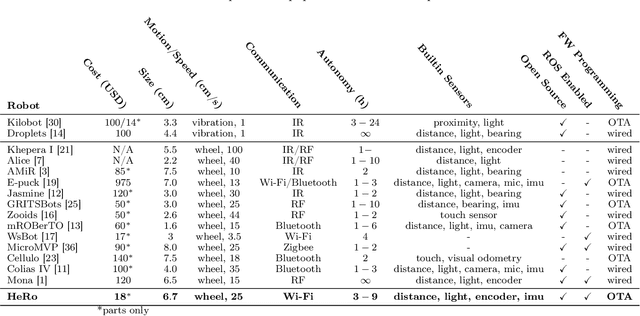

The current state of electronic component miniaturization coupled with the increasing efficiency in hardware and software allow the development of smaller and compact robotic systems. The convenience of using these small, simple, yet capable robots has gathered the research community's attention towards practical applications of swarm robotics. This paper presents the design of a novel platform for swarm robotics applications that is low cost, easy to assemble using off-the-shelf components, and deeply integrated with the most used robotic framework available today: ROS (Robot Operating System). The robotic platform is entirely open, composed of a 3D printed body and open-source software. We describe its architecture, present its main features, and evaluate its functionalities executing experiments using a couple of robots. Results demonstrate that the proposed mobile robot is very effective given its small size and reduced cost, being suitable for swarm robotics research and education.
Cooperative Object Transportation using Gibbs Random Fields
Sep 28, 2021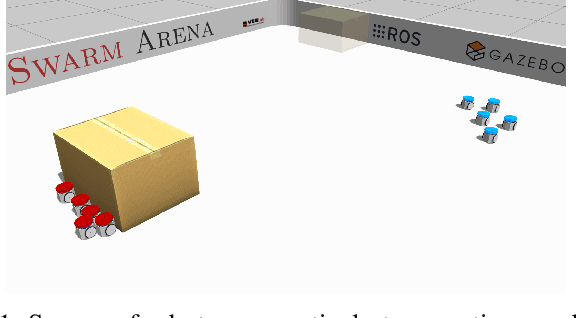
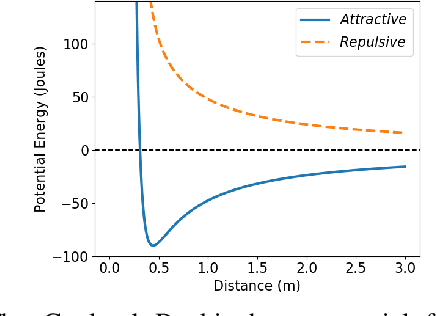
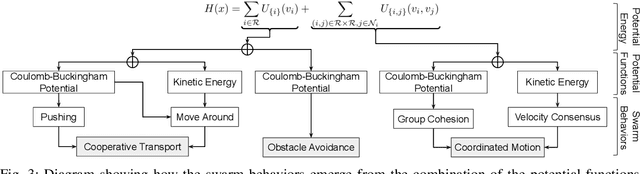
This paper presents a novel methodology that allows a swarm of robots to perform a cooperative transportation task. Our approach consists of modeling the swarm as a {\em Gibbs Random Field} (GRF), taking advantage of this framework's locality properties. By setting appropriate potential functions, robots can dynamically navigate, form groups, and perform cooperative transportation in a completely decentralized fashion. Moreover, these behaviors emerge from the local interactions without the need for explicit communication or coordination. To evaluate our methodology, we perform a series of simulations and proof-of-concept experiments in different scenarios. Our results show that the method is scalable, adaptable, and robust to failures and changes in the environment.
On the impact of MDP design for Reinforcement Learning agents in Resource Management
Sep 07, 2021The recent progress in Reinforcement Learning applications to Resource Management presents MDPs without a deeper analysis of the impacts of design decisions on agent performance. In this paper, we compare and contrast four different MDP variations, discussing their computational requirements and impacts on agent performance by means of an empirical analysis. We conclude by showing that, in our experiments, when using Multi-Layer Perceptrons as approximation function, a compact state representation allows transfer of agents between environments, and that transferred agents have good performance and outperform specialized agents in 80\% of the tested scenarios, even without retraining.
Prediction-Free, Real-Time Flexible Control of Tidal Lagoons through Proximal Policy Optimisation: A Case Study for the Swansea Lagoon
Jul 16, 2021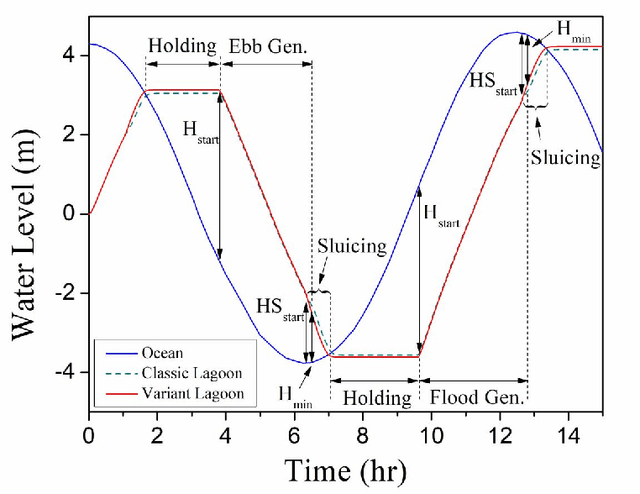


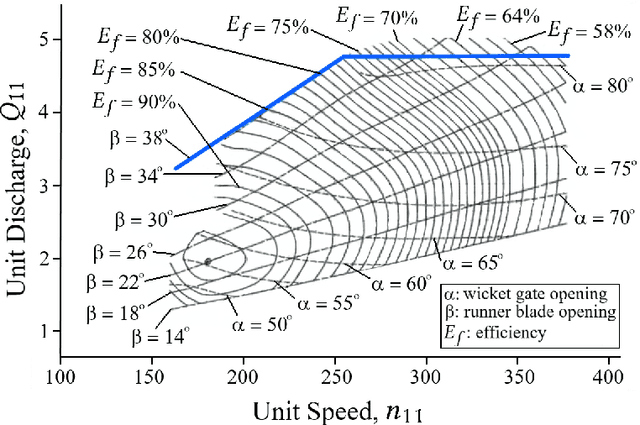
Tidal range structures have been considered for large scale electricity generation for their potential ability to produce reasonable predictable energy without the emission of greenhouse gases. Once the main forcing components for driving the tides have deterministic dynamics, the available energy in a given tidal power plant has been estimated, through analytical and numerical optimisation routines, as a mostly predictable event. This constraint imposes state-of-art flexible operation methods to rely on tidal predictions (concurrent with measured data and up to a multiple of half-tidal cycles into the future) to infer best operational strategies for tidal lagoons, with the additional cost of requiring to run optimisation routines for every new tide. In this paper, we propose a novel optimised operation of tidal lagoons with proximal policy optimisation through Unity ML-Agents. We compare this technique with 6 different operation optimisation approaches (baselines) devised from the literature, utilising the Swansea Bay Tidal Lagoon as a case study. We show that our approach is successful in maximising energy generation through an optimised operational policy of turbines and sluices, yielding competitive results with state-of-the-art methods of optimisation, regardless of test data used, requiring training once and performing real-time flexible control with measured ocean data only.