 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChemistry-Inspired Pattern Formation with Robotic Swarms
Jun 07, 2022



Self-organized emergent patterns can be widely seen in particle interactions producing complex structures such as chemical elements and molecules. Inspired by these interactions, this work presents a novel stochastic approach that allows a swarm of heterogeneous robots to create emergent patterns in a completely decentralized fashion and relying only on local information. Our approach consists of modeling the swarm configuration as a dynamic Gibbs Random Field (GRF) and setting constraints on the neighborhood system inspired by chemistry rules that dictate binding polarity between particles. Using the GRF model, we determine velocities for each robot, resulting in behaviors that lead to the creation of patterns or shapes. Simulated experiments show the versatility of the approach in producing a variety of patterns, and experiments with a group of physical robots show the feasibility in potential applications.
HeRo 2.0: A Low-Cost Robot for Swarm Robotics Research
Mar 04, 2022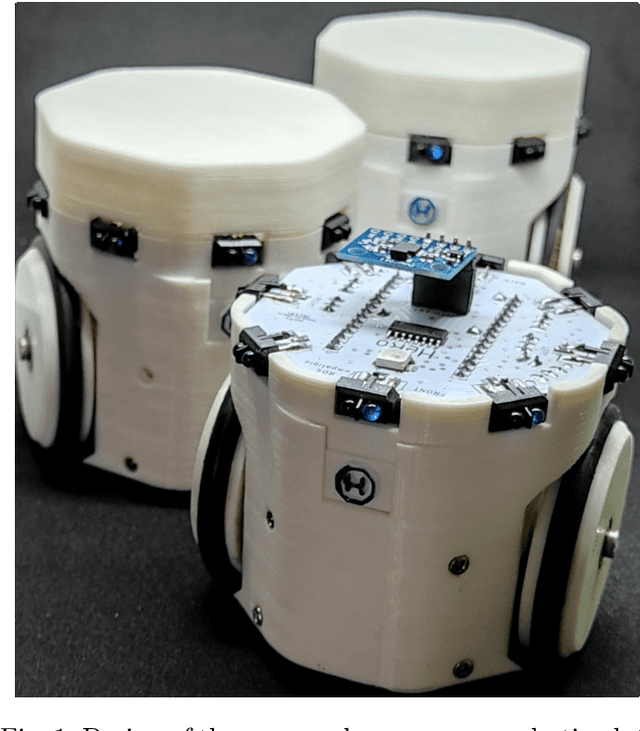
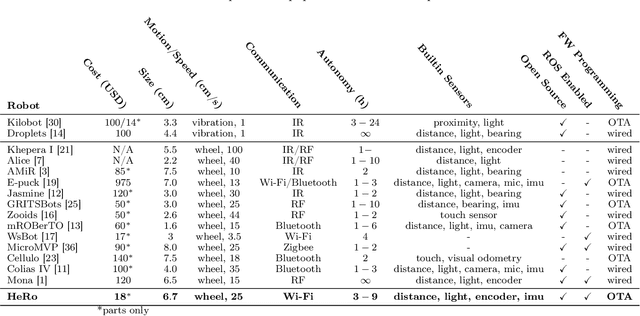

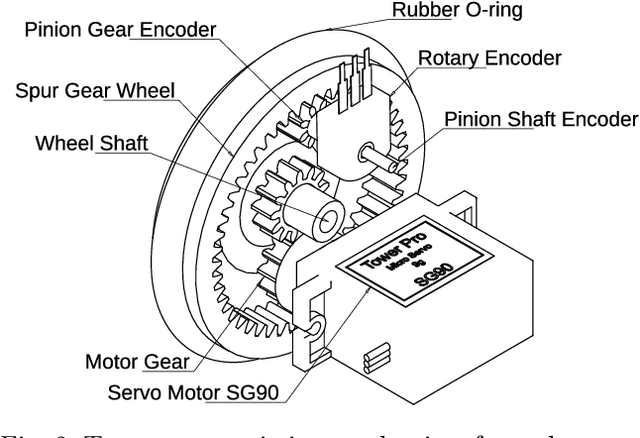
The current state of electronic component miniaturization coupled with the increasing efficiency in hardware and software allow the development of smaller and compact robotic systems. The convenience of using these small, simple, yet capable robots has gathered the research community's attention towards practical applications of swarm robotics. This paper presents the design of a novel platform for swarm robotics applications that is low cost, easy to assemble using off-the-shelf components, and deeply integrated with the most used robotic framework available today: ROS (Robot Operating System). The robotic platform is entirely open, composed of a 3D printed body and open-source software. We describe its architecture, present its main features, and evaluate its functionalities executing experiments using a couple of robots. Results demonstrate that the proposed mobile robot is very effective given its small size and reduced cost, being suitable for swarm robotics research and education.
Cooperative Object Transportation using Gibbs Random Fields
Sep 28, 2021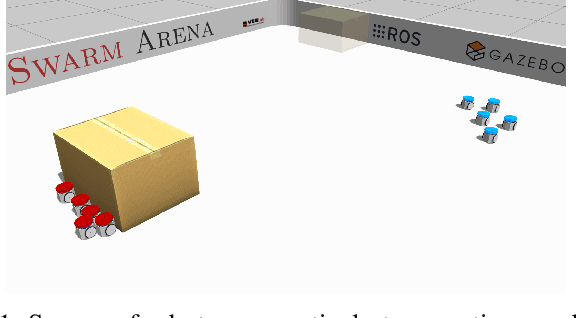
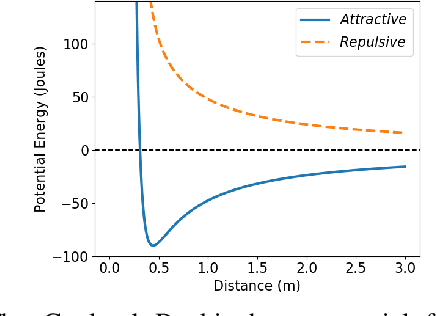
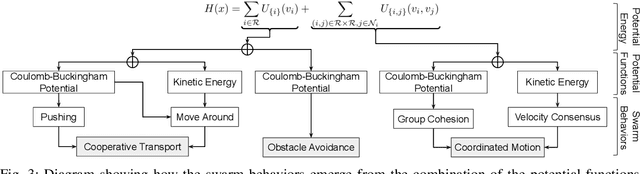
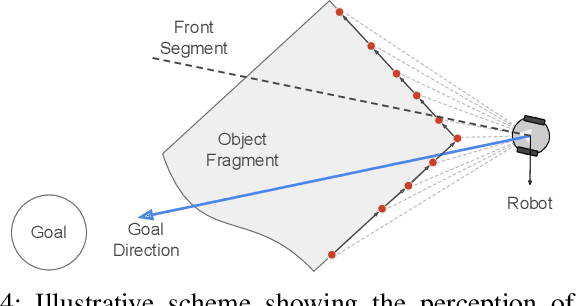
This paper presents a novel methodology that allows a swarm of robots to perform a cooperative transportation task. Our approach consists of modeling the swarm as a {\em Gibbs Random Field} (GRF), taking advantage of this framework's locality properties. By setting appropriate potential functions, robots can dynamically navigate, form groups, and perform cooperative transportation in a completely decentralized fashion. Moreover, these behaviors emerge from the local interactions without the need for explicit communication or coordination. To evaluate our methodology, we perform a series of simulations and proof-of-concept experiments in different scenarios. Our results show that the method is scalable, adaptable, and robust to failures and changes in the environment.
Flocking-Segregative Swarming Behaviors using Gibbs Random Fields
Apr 22, 2021



This paper presents a novel approach that allows a swarm of heterogeneous robots to produce simultaneously segregative and flocking behaviors using only local sensing. These behaviors have been widely studied in swarm robotics and their combination allows the execution of several complex tasks, ranging from surveillance and reconnaissance, to search and rescue, to transport, and to foraging. Although there are several works in the literature proposing different strategies to achieve these behaviors, to the best of our knowledge, this paper is the first to propose an algorithm that emerges simultaneously behaviors and do not rely on global information or communication. Our approach consists of modeling the swarm as a Gibbs Random Field (GRF) and using appropriate potential functions to reach segregation, cohesion and consensus on the velocity of the swarm. Simulations and proof-of-concept experiments using real robots are presented to evaluate the performance of our methodology in comparison to some of the state-of-the-art works that tackle segregative behaviors.