 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
HeRo 2.0: A Low-Cost Robot for Swarm Robotics Research
Mar 04, 2022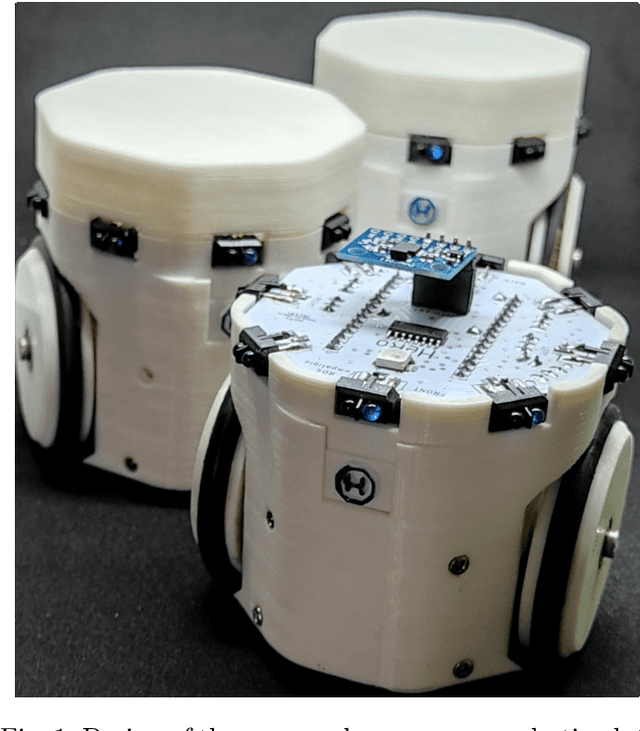
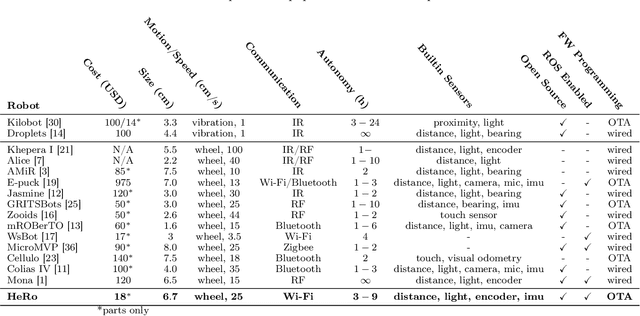

The current state of electronic component miniaturization coupled with the increasing efficiency in hardware and software allow the development of smaller and compact robotic systems. The convenience of using these small, simple, yet capable robots has gathered the research community's attention towards practical applications of swarm robotics. This paper presents the design of a novel platform for swarm robotics applications that is low cost, easy to assemble using off-the-shelf components, and deeply integrated with the most used robotic framework available today: ROS (Robot Operating System). The robotic platform is entirely open, composed of a 3D printed body and open-source software. We describe its architecture, present its main features, and evaluate its functionalities executing experiments using a couple of robots. Results demonstrate that the proposed mobile robot is very effective given its small size and reduced cost, being suitable for swarm robotics research and education.