 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntermittent Rendezvous Plans with Mixed Integer Linear Program for Large-Scale Multi-Robot Exploration
Nov 15, 2025Multi-Robot Exploration (MRE) systems with communication constraints have proven efficient in accomplishing a variety of tasks, including search-and-rescue, stealth, and military operations. While some works focus on opportunistic approaches for efficiency, others concentrate on pre-planned trajectories or scheduling for increased interpretability. However, scheduling usually requires knowledge of the environment beforehand, which prevents its deployment in several domains due to related uncertainties (e.g., underwater exploration). In our previous work, we proposed an intermittent communications framework for MRE under communication constraints that uses scheduled rendezvous events to mitigate such limitations. However, the system was unable to generate optimal plans and had no mechanisms to follow the plan considering realistic trajectories, which is not suited for real-world deployments. In this work, we further investigate the problem by formulating the Multi-Robot Exploration with Communication Constraints and Intermittent Connectivity (MRE-CCIC) problem. We propose a Mixed-Integer Linear Program (MILP) formulation to generate rendezvous plans and a policy to follow them based on the Rendezvous Tracking for Unknown Scenarios (RTUS) mechanism. The RTUS is a simple rule to allow robots to follow the assigned plan, considering unknown conditions. Finally, we evaluated our method in a large-scale environment configured in Gazebo simulations. The results suggest that our method can follow the plan promptly and accomplish the task efficiently. We provide an open-source implementation of both the MILP plan generator and the large-scale MRE-CCIC.
Communication-Constrained Multi-Robot Exploration with Intermittent Rendezvous
Oct 02, 2023This paper deals with the Multi-robot Exploration (MRE) under communication constraints problem. We propose a novel intermittent rendezvous method that allows robots to explore an unknown environment while sharing maps at rendezvous locations through agreements. In our method, robots update the agreements to spread the rendezvous locations during the exploration and prioritize exploring unknown areas near them. To generate the agreements automatically, we reduced the MRE to instances of the Job Shop Scheduling Problem (JSSP) and ensured intermittent communication through a temporal connectivity graph. We evaluate our method in simulation in various virtual urban environments and a Gazebo simulation using the Robot Operating System (ROS). Our results suggest that our method can be better than using relays or maintaining intermittent communication with a base station since we can explore faster without additional hardware to create a relay network.
Double Q-Learning for Citizen Relocation During Natural Hazards
Sep 12, 2022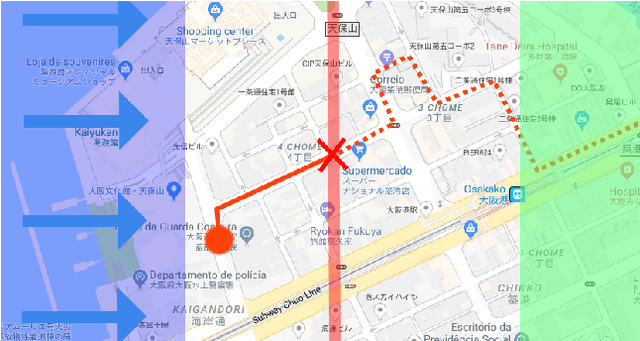
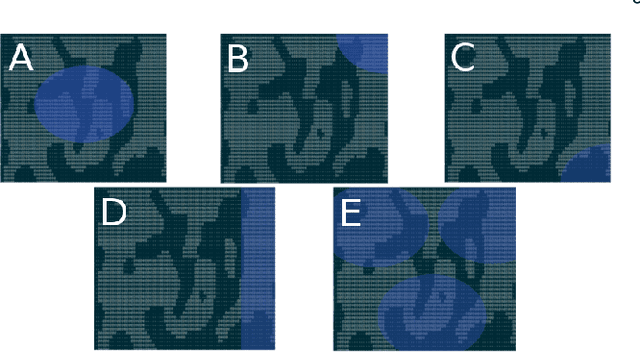
Natural disasters can cause substantial negative socio-economic impacts around the world, due to mortality, relocation, rates, and reconstruction decisions. Robotics has been successfully applied to identify and rescue victims during the occurrence of a natural hazard. However, little effort has been taken to deploy solutions where an autonomous robot can save the life of a citizen by itself relocating it, without the need to wait for a rescue team composed of humans. Reinforcement learning approaches can be used to deploy such a solution, however, one of the most famous algorithms to deploy it, the Q-learning, suffers from biased results generated when performing its learning routines. In this research a solution for citizen relocation based on Partially Observable Markov Decision Processes is adopted, where the capability of the Double Q-learning in relocating citizens during a natural hazard is evaluated under a proposed hazard simulation engine based on a grid world. The performance of the solution was measured as a success rate of a citizen relocation procedure, where the results show that the technique portrays a performance above 100% for easy scenarios and near 50% for hard ones.
Solving the Job Shop Scheduling Problem with Ant Colony Optimization
Sep 12, 2022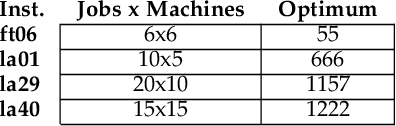


The Job Shop Schedule Problem (JSSP) refers to the ability of an agent to allocate tasks that should be executed in a specified time in a machine from a cluster. The task allocation can be achieved from several methods, however, this report it is explored the ability of the Ant Colony Optimization to generate feasible solutions for several JSSP instances. This proposal models the JSSP as a complete graph since disjunct models can prevent the ACO from exploring all the search space. Several instances of the JSSP were used to evaluate the proposal. Results suggest that the algorithm can reach optimum solutions for easy and harder instances with a selection of parameters.
Handcrafted Feature Selection Techniques for Pattern Recognition: A Survey
Sep 06, 2022

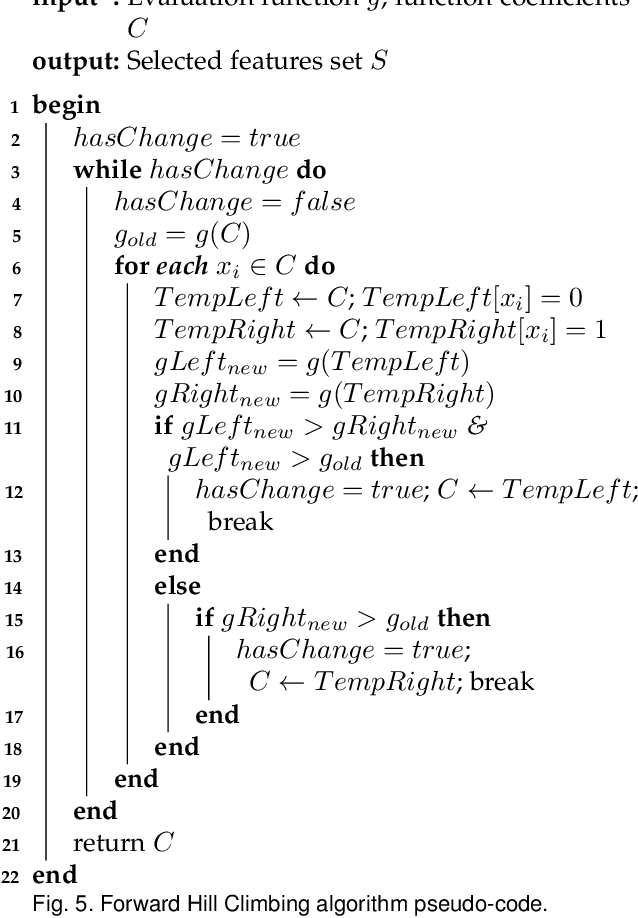

The accuracy of a classifier, when performing Pattern recognition, is mostly tied to the quality and representativeness of the input feature vector. Feature Selection is a process that allows for representing information properly and may increase the accuracy of a classifier. This process is responsible for finding the best possible features, thus allowing us to identify to which class a pattern belongs. Feature selection methods can be categorized as Filters, Wrappers, and Embed. This paper presents a survey on some Filters and Wrapper methods for handcrafted feature selection. Some discussions, with regard to the data structure, processing time, and ability to well represent a feature vector, are also provided in order to explicitly show how appropriate some methods are in order to perform feature selection. Therefore, the presented feature selection methods can be accurate and efficient if applied considering their positives and negatives, finding which one fits best the problem's domain may be the hardest task.