 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision-free time-optimal path parameterization for multi-robot teams
Sep 25, 2024



Coordinating the motion of multiple robots in cluttered environments remains a computationally challenging task. We study the problem of minimizing the execution time of a set of geometric paths by a team of robots with state-dependent actuation constraints. We propose a Time-Optimal Path Parameterization (TOPP) algorithm for multiple car-like agents, where the modulation of the timing of every robot along its assigned path is employed to ensure collision avoidance and dynamic feasibility. This is achieved through the use of a priority queue to determine the order of trajectory execution for each robot while taking into account all possible collisions with higher priority robots in a spatiotemporal graph. We show a 10-20% reduction in makespan against existing state-of-the-art methods and validate our approach through simulations and hardware experiments.
TOPPQuad: Dynamically-Feasible Time Optimal Path Parametrization for Quadrotors
Sep 20, 2023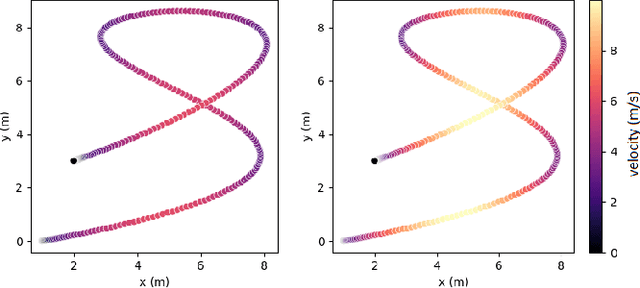
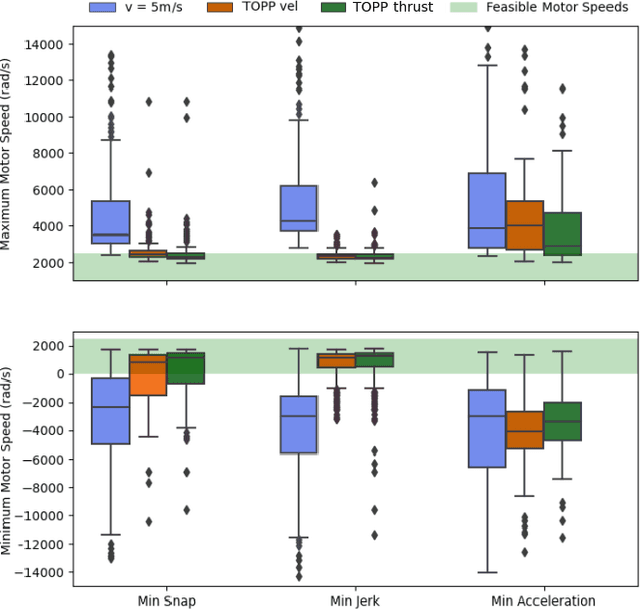


Planning time-optimal trajectories for quadrotors in cluttered environments is a challenging, non-convex problem. This paper addresses minimizing the traversal time of a given collision-free geometric path without violating bounds on individual motor thrusts of the vehicle. Previous approaches have either relied on convex relaxations that do not guarantee dynamic feasibility, or have generated overly conservative time parametrizations. We propose TOPPQuad, a time-optimal path parameterization algorithm for quadrotors which explicitly incorporates quadrotor rigid body dynamics and constraints such as bounds on inputs (including motor speeds) and state of the vehicle (including the pose, linear and angular velocity and acceleration). We demonstrate the ability of the planner to generate faster trajectories that respect hardware constraints of the robot compared to several planners with relaxed notions of dynamic feasibility. We also demonstrate how TOPPQuad can be used to plan trajectories for quadrotors that utilize bidirectional motors. Overall, the proposed approach paves a way towards maximizing the efficacy of autonomous micro aerial vehicles while ensuring their safety.