 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlow-Based Control of Marine Robots in Gyre-Like Environments
Paper and Code
Mar 01, 2022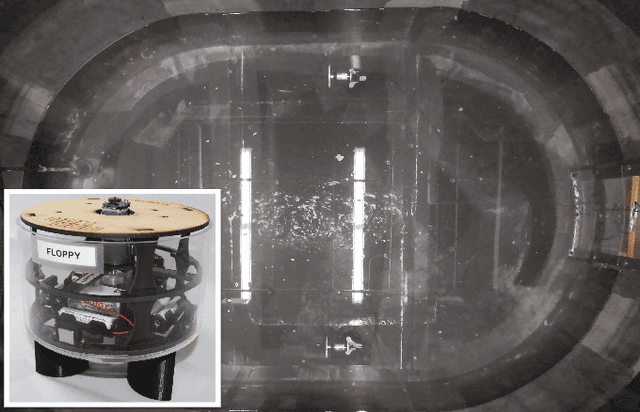
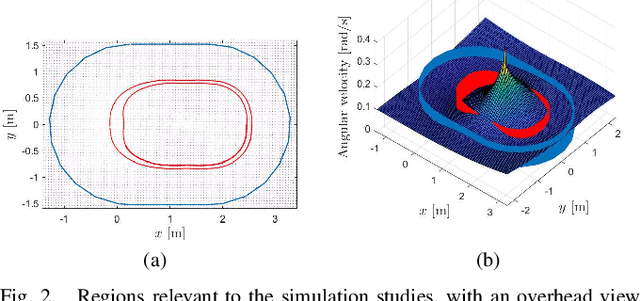
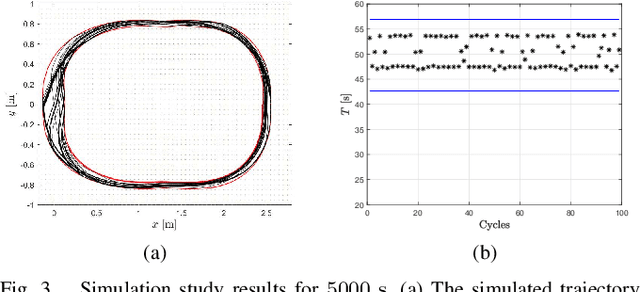
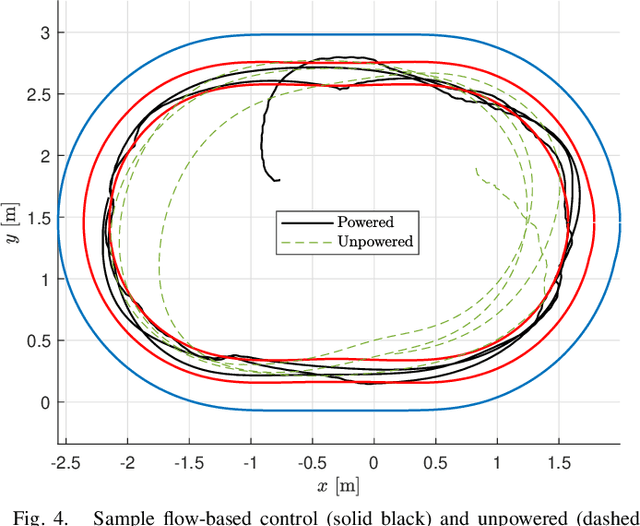
We present a flow-based control strategy that enables resource-constrained marine robots to patrol gyre-like flow environments on an orbital trajectory with a periodicity in a given range. The controller does not require a detailed model of the flow field and relies only on the robot's location relative to the center of the gyre. Instead of precisely tracking a pre-defined trajectory, the robots are tasked to stay in between two bounding trajectories with known periodicity. Furthermore, the proposed strategy leverages the surrounding flow field to minimize control effort. We prove that the proposed strategy enables robots to cycle in the flow satisfying the desired periodicity requirements. Our method is tested and validated both in simulation and in experiments using a low-cost, underactuated, surface swimming robot, i.e. the Modboat.