 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM-Flock: Decentralized Multi-Robot Flocking via Large Language Models and Influence-Based Consensus
May 10, 2025Large Language Models (LLMs) have advanced rapidly in recent years, demonstrating strong capabilities in problem comprehension and reasoning. Inspired by these developments, researchers have begun exploring the use of LLMs as decentralized decision-makers for multi-robot formation control. However, prior studies reveal that directly applying LLMs to such tasks often leads to unstable and inconsistent behaviors, where robots may collapse to the centroid of their positions or diverge entirely due to hallucinated reasoning, logical inconsistencies, and limited coordination awareness. To overcome these limitations, we propose a novel framework that integrates LLMs with an influence-based plan consensus protocol. In this framework, each robot independently generates a local plan toward the desired formation using its own LLM. The robots then iteratively refine their plans through a decentralized consensus protocol that accounts for their influence on neighboring robots. This process drives the system toward a coherent and stable flocking formation in a fully decentralized manner. We evaluate our approach through comprehensive simulations involving both state-of-the-art closed-source LLMs (e.g., o3-mini, Claude 3.5) and open-source models (e.g., Llama3.1-405b, Qwen-Max, DeepSeek-R1). The results show notable improvements in stability, convergence, and adaptability over previous LLM-based methods. We further validate our framework on a physical team of Crazyflie drones, demonstrating its practical viability and effectiveness in real-world multi-robot systems.
ACVUBench: Audio-Centric Video Understanding Benchmark
Mar 25, 2025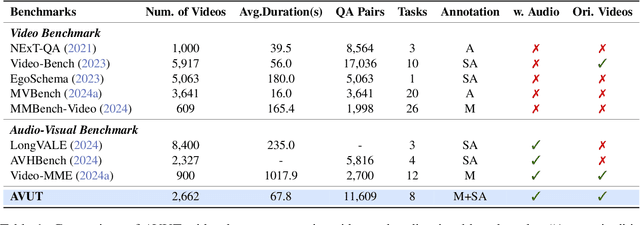
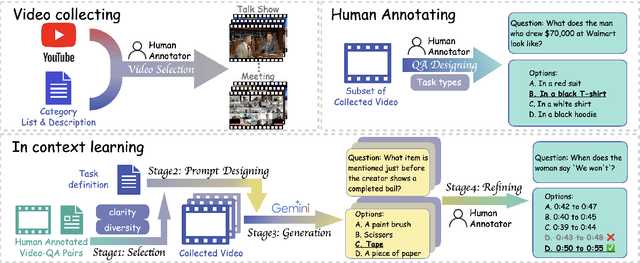
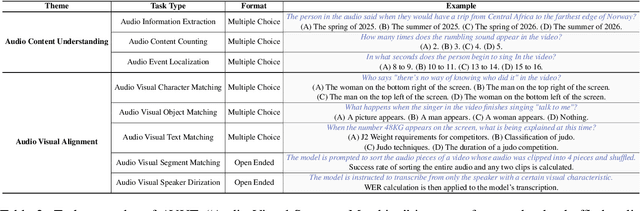
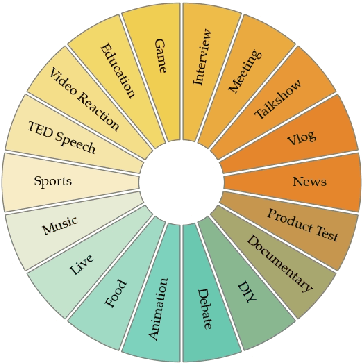
Audio often serves as an auxiliary modality in video understanding tasks of audio-visual large language models (LLMs), merely assisting in the comprehension of visual information. However, a thorough understanding of videos significantly depends on auditory information, as audio offers critical context, emotional cues, and semantic meaning that visual data alone often lacks. This paper proposes an audio-centric video understanding benchmark (ACVUBench) to evaluate the video comprehension capabilities of multimodal LLMs with a particular focus on auditory information. Specifically, ACVUBench incorporates 2,662 videos spanning 18 different domains with rich auditory information, together with over 13k high-quality human annotated or validated question-answer pairs. Moreover, ACVUBench introduces a suite of carefully designed audio-centric tasks, holistically testing the understanding of both audio content and audio-visual interactions in videos. A thorough evaluation across a diverse range of open-source and proprietary multimodal LLMs is performed, followed by the analyses of deficiencies in audio-visual LLMs. Demos are available at https://github.com/lark-png/ACVUBench.
Large Language Models for Multi-Robot Systems: A Survey
Feb 06, 2025The rapid advancement of Large Language Models (LLMs) has opened new possibilities in Multi-Robot Systems (MRS), enabling enhanced communication, task planning, and human-robot interaction. Unlike traditional single-robot and multi-agent systems, MRS poses unique challenges, including coordination, scalability, and real-world adaptability. This survey provides the first comprehensive exploration of LLM integration into MRS. It systematically categorizes their applications across high-level task allocation, mid-level motion planning, low-level action generation, and human intervention. We highlight key applications in diverse domains, such as household robotics, construction, formation control, target tracking, and robot games, showcasing the versatility and transformative potential of LLMs in MRS. Furthermore, we examine the challenges that limit adapting LLMs in MRS, including mathematical reasoning limitations, hallucination, latency issues, and the need for robust benchmarking systems. Finally, we outline opportunities for future research, emphasizing advancements in fine-tuning, reasoning techniques, and task-specific models. This survey aims to guide researchers in the intelligence and real-world deployment of MRS powered by LLMs. Based on the fast-evolving nature of research in the field, we keep updating the papers in the open-source Github repository.
Resilient and Adaptive Replanning for Multi-Robot Target Tracking with Sensing and Communication Danger Zones
Sep 17, 2024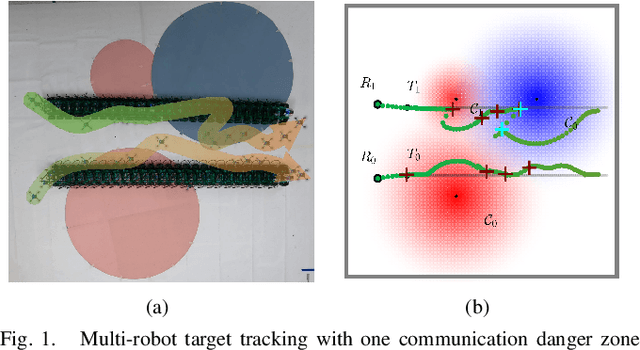
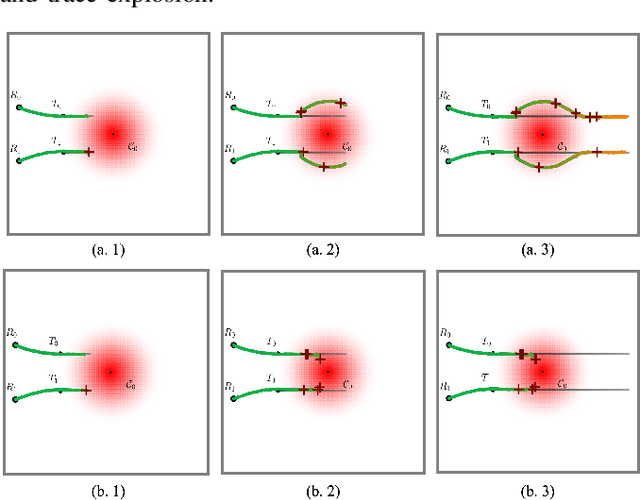
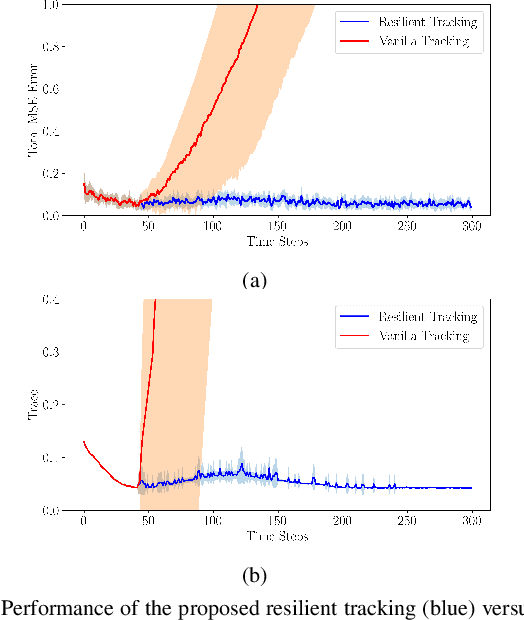
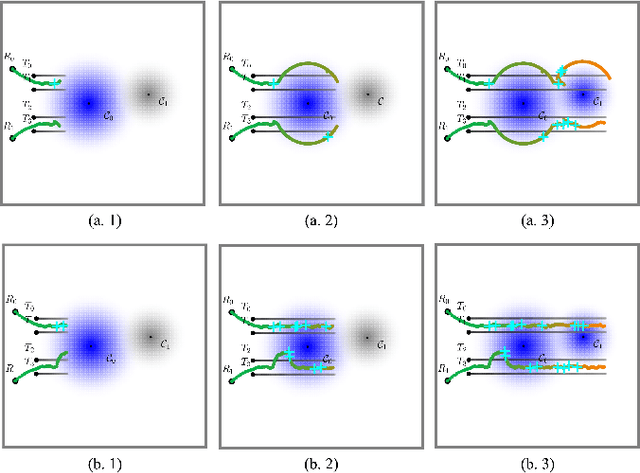
Multi-robot collaboration for target tracking presents significant challenges in hazardous environments, including addressing robot failures, dynamic priority changes, and other unpredictable factors. Moreover, these challenges are increased in adversarial settings if the environment is unknown. In this paper, we propose a resilient and adaptive framework for multi-robot, multi-target tracking in environments with unknown sensing and communication danger zones. The damages posed by these zones are temporary, allowing robots to track targets while accepting the risk of entering dangerous areas. We formulate the problem as an optimization with soft chance constraints, enabling real-time adjustments to robot behavior based on varying types of dangers and failures. An adaptive replanning strategy is introduced, featuring different triggers to improve group performance. This approach allows for dynamic prioritization of target tracking and risk aversion or resilience, depending on evolving resources and real-time conditions. To validate the effectiveness of the proposed method, we benchmark and evaluate it across multiple scenarios in simulation and conduct several real-world experiments.
Domain-Transferred Synthetic Data Generation for Improving Monocular Depth Estimation
May 02, 2024A major obstacle to the development of effective monocular depth estimation algorithms is the difficulty in obtaining high-quality depth data that corresponds to collected RGB images. Collecting this data is time-consuming and costly, and even data collected by modern sensors has limited range or resolution, and is subject to inconsistencies and noise. To combat this, we propose a method of data generation in simulation using 3D synthetic environments and CycleGAN domain transfer. We compare this method of data generation to the popular NYUDepth V2 dataset by training a depth estimation model based on the DenseDepth structure using different training sets of real and simulated data. We evaluate the performance of the models on newly collected images and LiDAR depth data from a Husky robot to verify the generalizability of the approach and show that GAN-transformed data can serve as an effective alternative to real-world data, particularly in depth estimation.
Multi-Robot Target Tracking with Sensing and Communication Danger Zones
Apr 11, 2024



Multi-robot target tracking finds extensive applications in different scenarios, such as environmental surveillance and wildfire management, which require the robustness of the practical deployment of multi-robot systems in uncertain and dangerous environments. Traditional approaches often focus on the performance of tracking accuracy with no modeling and assumption of the environments, neglecting potential environmental hazards which result in system failures in real-world deployments. To address this challenge, we investigate multi-robot target tracking in the adversarial environment considering sensing and communication attacks with uncertainty. We design specific strategies to avoid different danger zones and proposed a multi-agent tracking framework under the perilous environment. We approximate the probabilistic constraints and formulate practical optimization strategies to address computational challenges efficiently. We evaluate the performance of our proposed methods in simulations to demonstrate the ability of robots to adjust their risk-aware behaviors under different levels of environmental uncertainty and risk confidence. The proposed method is further validated via real-world robot experiments where a team of drones successfully track dynamic ground robots while being risk-aware of the sensing and/or communication danger zones.
Challenges Faced by Large Language Models in Solving Multi-Agent Flocking
Apr 06, 2024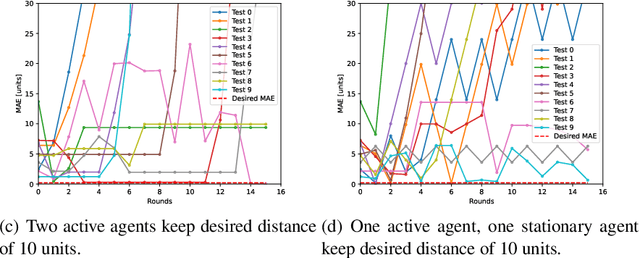
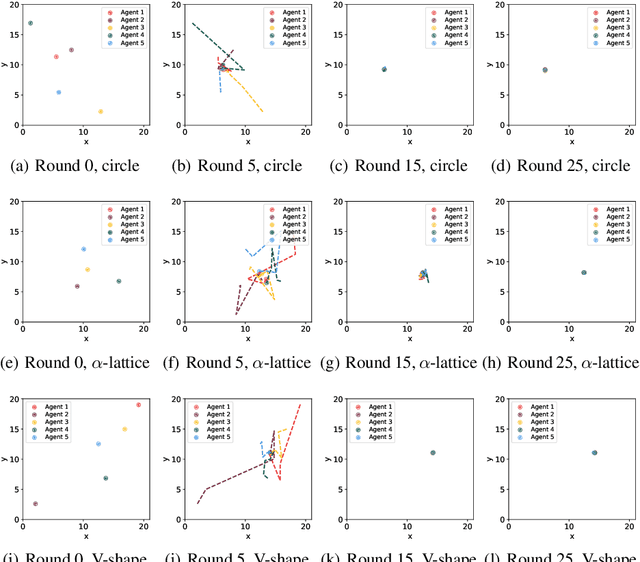
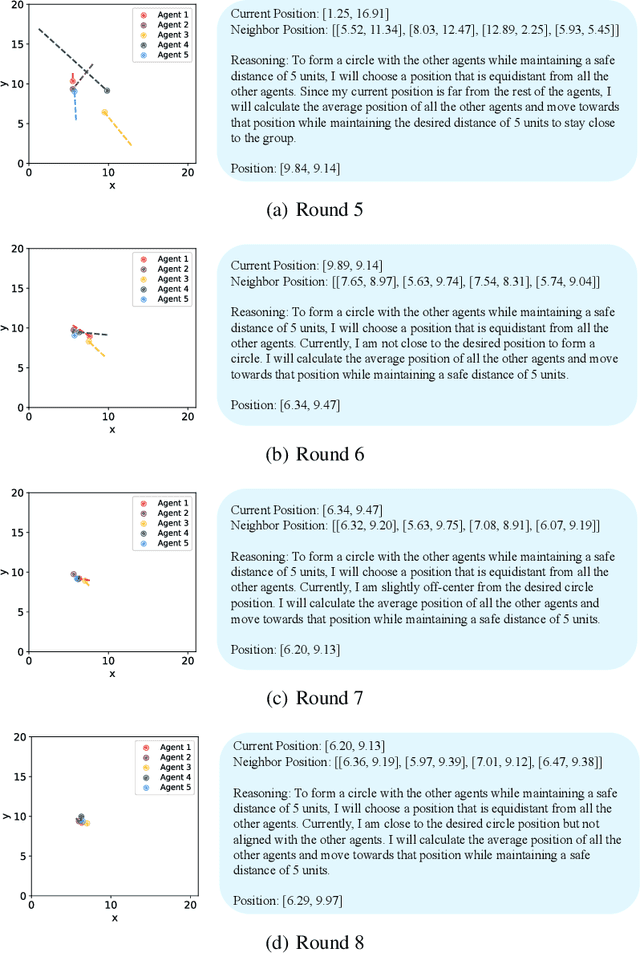
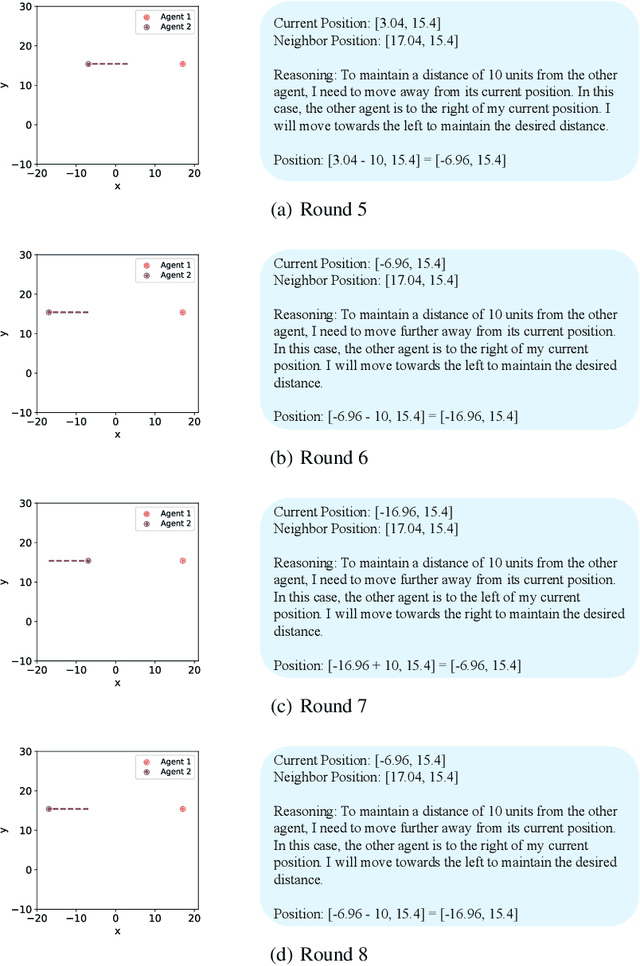
Flocking is a behavior where multiple agents in a system attempt to stay close to each other while avoiding collision and maintaining a desired formation. This is observed in the natural world and has applications in robotics, including natural disaster search and rescue, wild animal tracking, and perimeter surveillance and patrol. Recently, large language models (LLMs) have displayed an impressive ability to solve various collaboration tasks as individual decision-makers. Solving multi-agent flocking with LLMs would demonstrate their usefulness in situations requiring spatial and decentralized decision-making. Yet, when LLM-powered agents are tasked with implementing multi-agent flocking, they fall short of the desired behavior. After extensive testing, we find that agents with LLMs as individual decision-makers typically opt to converge on the average of their initial positions or diverge from each other. After breaking the problem down, we discover that LLMs cannot understand maintaining a shape or keeping a distance in a meaningful way. Solving multi-agent flocking with LLMs would enhance their ability to understand collaborative spatial reasoning and lay a foundation for addressing more complex multi-agent tasks. This paper discusses the challenges LLMs face in multi-agent flocking and suggests areas for future improvement and research.
Learning Decentralized Flocking Controllers with Spatio-Temporal Graph Neural Network
Oct 02, 2023Recently a line of researches has delved the use of graph neural networks (GNNs) for decentralized control in swarm robotics. However, it has been observed that relying solely on the states of immediate neighbors is insufficient to imitate a centralized control policy. To address this limitation, prior studies proposed incorporating $L$-hop delayed states into the computation. While this approach shows promise, it can lead to a lack of consensus among distant flock members and the formation of small clusters, consequently resulting in the failure of cohesive flocking behaviors. Instead, our approach leverages spatiotemporal GNN, named STGNN that encompasses both spatial and temporal expansions. The spatial expansion collects delayed states from distant neighbors, while the temporal expansion incorporates previous states from immediate neighbors. The broader and more comprehensive information gathered from both expansions results in more effective and accurate predictions. We develop an expert algorithm for controlling a swarm of robots and employ imitation learning to train our decentralized STGNN model based on the expert algorithm. We simulate the proposed STGNN approach in various settings, demonstrating its decentralized capacity to emulate the global expert algorithm. Further, we implemented our approach to achieve cohesive flocking, leader following and obstacle avoidance by a group of Crazyflie drones. The performance of STGNN underscores its potential as an effective and reliable approach for achieving cohesive flocking, leader following and obstacle avoidance tasks.
Assignment Algorithms for Multi-Robot Multi-Target Tracking with Sufficient and Limited Sensing Capability
Mar 08, 2023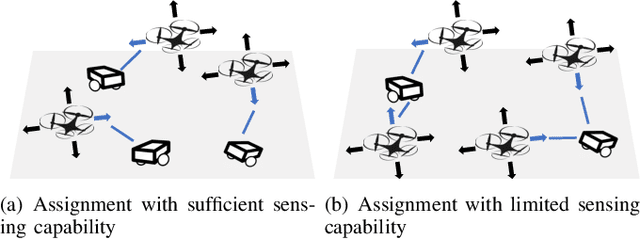
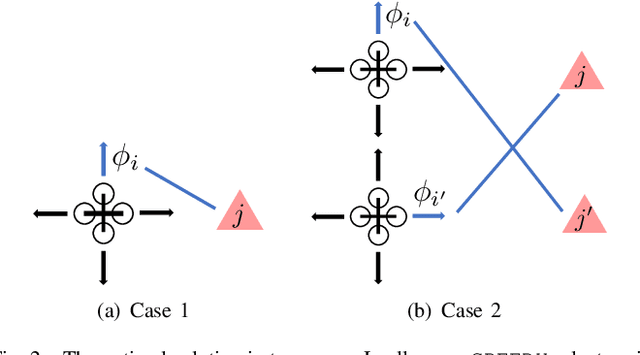
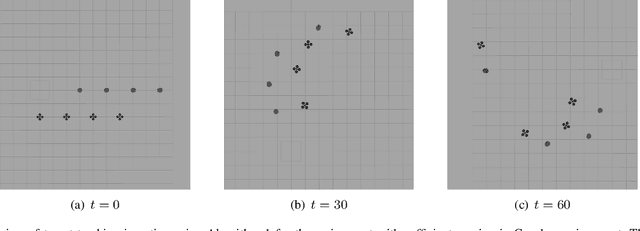
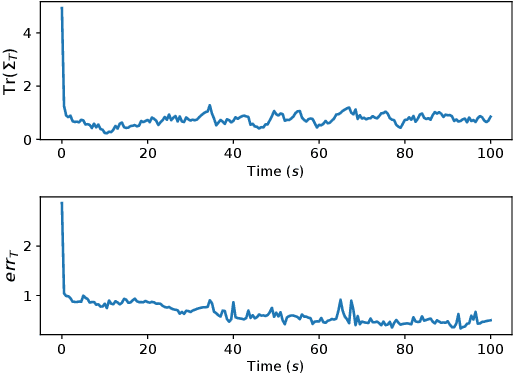
We study the problem of assigning robots with actions to track targets. The objective is to optimize the robot team's tracking quality which can be defined as the reduction in the uncertainty of the targets' states. Specifically, we consider two assignment problems given the different sensing capabilities of the robots. In the first assignment problem, a single robot is sufficient to track a target. To this end, we present a greedy algorithm (Algorithm 1) that assigns a robot with its action to each target. We prove that the greedy algorithm has a 1/2 approximation bound and runs in polynomial time. Then, we study the second assignment problem where two robots are necessary to track a target. We design another greedy algorithm (Algorithm 2) that assigns a pair of robots with their actions to each target. We prove that the greedy algorithm achieves a 1/3 approximation bound and has a polynomial running time. Moreover, we illustrate the performance of the two greedy algorithms in the ROS-Gazebo environment where the tracking patterns of one robot following one target using Algorithm 1 and two robots following one target using Algorithm 2 are clearly observed. Further, we conduct extensive comparisons to demonstrate that the two greedy algorithms perform close to their optimal counterparts and much better than their respective (1/2 and 1/3) approximation bounds.
Flow-Based Control of Marine Robots in Gyre-Like Environments
Mar 01, 2022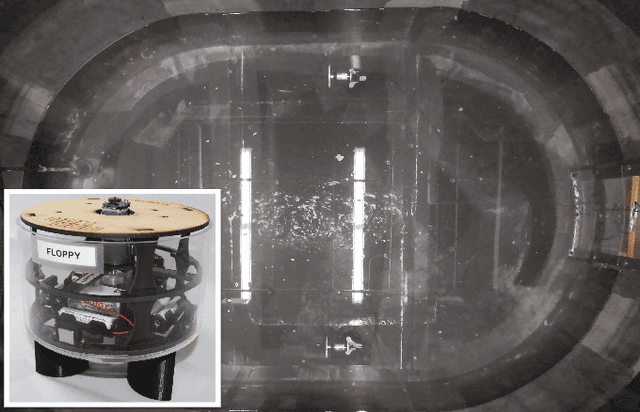
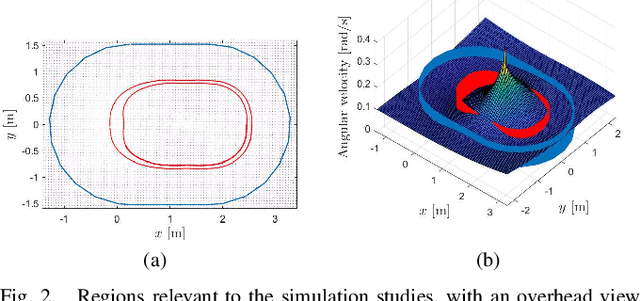
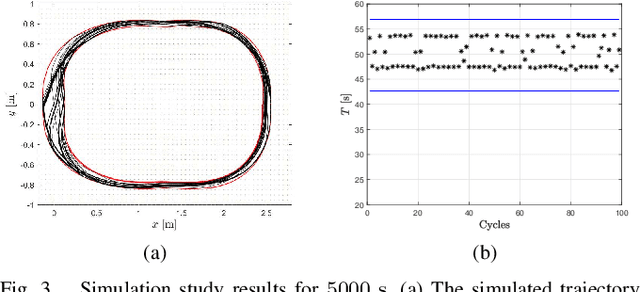
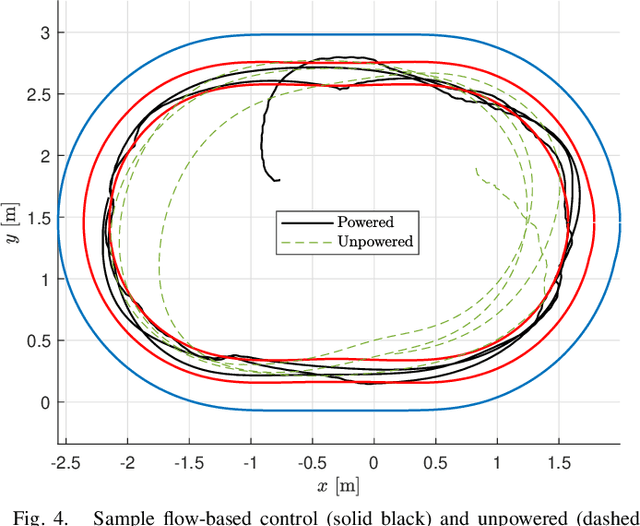
We present a flow-based control strategy that enables resource-constrained marine robots to patrol gyre-like flow environments on an orbital trajectory with a periodicity in a given range. The controller does not require a detailed model of the flow field and relies only on the robot's location relative to the center of the gyre. Instead of precisely tracking a pre-defined trajectory, the robots are tasked to stay in between two bounding trajectories with known periodicity. Furthermore, the proposed strategy leverages the surrounding flow field to minimize control effort. We prove that the proposed strategy enables robots to cycle in the flow satisfying the desired periodicity requirements. Our method is tested and validated both in simulation and in experiments using a low-cost, underactuated, surface swimming robot, i.e. the Modboat.