 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChallenges Faced by Large Language Models in Solving Multi-Agent Flocking
Paper and Code
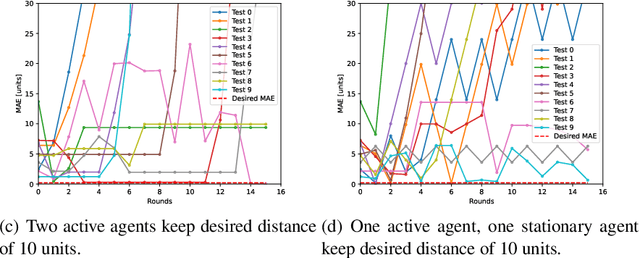
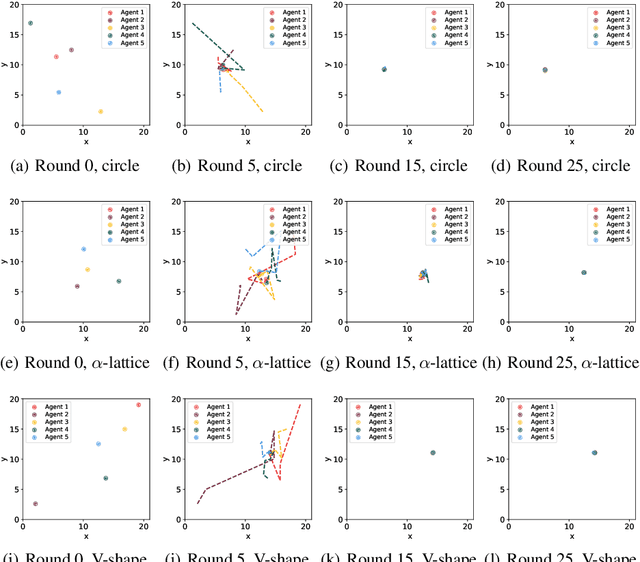
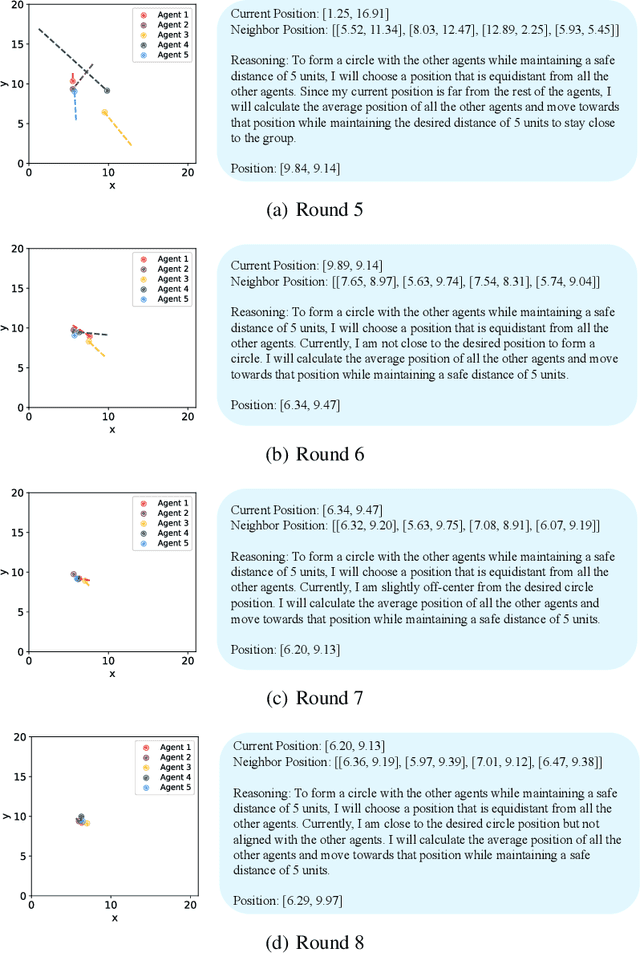
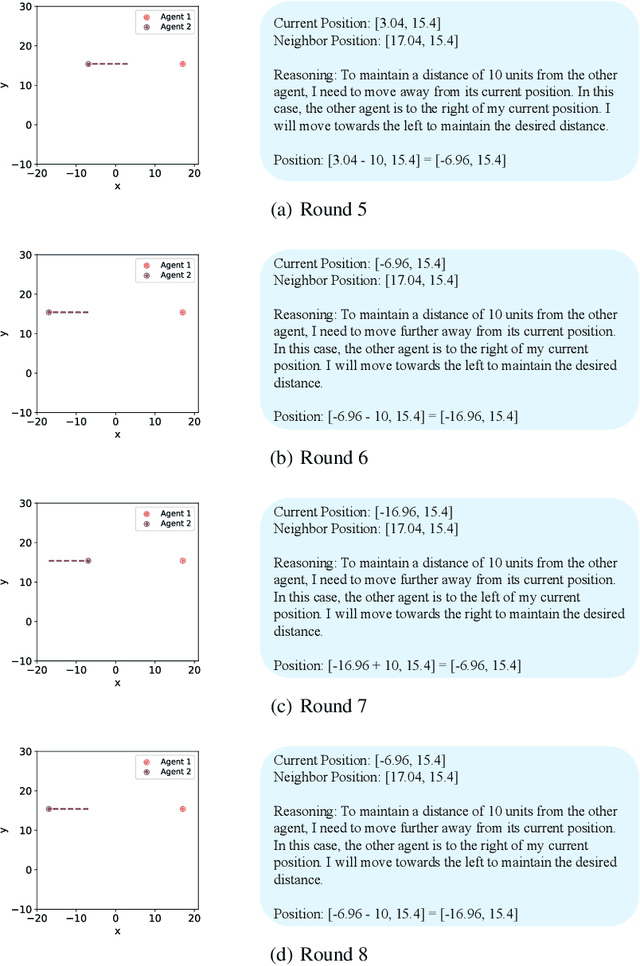
Flocking is a behavior where multiple agents in a system attempt to stay close to each other while avoiding collision and maintaining a desired formation. This is observed in the natural world and has applications in robotics, including natural disaster search and rescue, wild animal tracking, and perimeter surveillance and patrol. Recently, large language models (LLMs) have displayed an impressive ability to solve various collaboration tasks as individual decision-makers. Solving multi-agent flocking with LLMs would demonstrate their usefulness in situations requiring spatial and decentralized decision-making. Yet, when LLM-powered agents are tasked with implementing multi-agent flocking, they fall short of the desired behavior. After extensive testing, we find that agents with LLMs as individual decision-makers typically opt to converge on the average of their initial positions or diverge from each other. After breaking the problem down, we discover that LLMs cannot understand maintaining a shape or keeping a distance in a meaningful way. Solving multi-agent flocking with LLMs would enhance their ability to understand collaborative spatial reasoning and lay a foundation for addressing more complex multi-agent tasks. This paper discusses the challenges LLMs face in multi-agent flocking and suggests areas for future improvement and research.