 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge-Scale Terminal Agentic Trajectory Generation from Dockerized Environments
Feb 03, 2026Training agentic models for terminal-based tasks critically depends on high-quality terminal trajectories that capture realistic long-horizon interactions across diverse domains. However, constructing such data at scale remains challenging due to two key requirements: \textbf{\emph{Executability}}, since each instance requires a suitable and often distinct Docker environment; and \textbf{\emph{Verifiability}}, because heterogeneous task outputs preclude unified, standardized verification. To address these challenges, we propose \textbf{TerminalTraj}, a scalable pipeline that (i) filters high-quality repositories to construct Dockerized execution environments, (ii) generates Docker-aligned task instances, and (iii) synthesizes agent trajectories with executable validation code. Using TerminalTraj, we curate 32K Docker images and generate 50,733 verified terminal trajectories across eight domains. Models trained on this data with the Qwen2.5-Coder backbone achieve consistent performance improvements on TerminalBench (TB), with gains of up to 20\% on TB~1.0 and 10\% on TB~2.0 over their respective backbones. Notably, \textbf{TerminalTraj-32B} achieves strong performance among models with fewer than 100B parameters, reaching 35.30\% on TB~1.0 and 22.00\% on TB~2.0, and demonstrates improved test-time scaling behavior. All code and data are available at https://github.com/Wusiwei0410/TerminalTraj.
AGRO-SQL: Agentic Group-Relative Optimization with High-Fidelity Data Synthesis
Dec 29, 2025The advancement of Text-to-SQL systems is currently hindered by the scarcity of high-quality training data and the limited reasoning capabilities of models in complex scenarios. In this paper, we propose a holistic framework that addresses these issues through a dual-centric approach. From a Data-Centric perspective, we construct an iterative data factory that synthesizes RL-ready data characterized by high correctness and precise semantic-logic alignment, ensured by strict verification. From a Model-Centric perspective, we introduce a novel Agentic Reinforcement Learning framework. This framework employs a Diversity-Aware Cold Start stage to initialize a robust policy, followed by Group Relative Policy Optimization (GRPO) to refine the agent's reasoning via environmental feedback. Extensive experiments on BIRD and Spider benchmarks demonstrate that our synergistic approach achieves state-of-the-art performance among single-model methods.
P-Aligner: Enabling Pre-Alignment of Language Models via Principled Instruction Synthesis
Aug 06, 2025
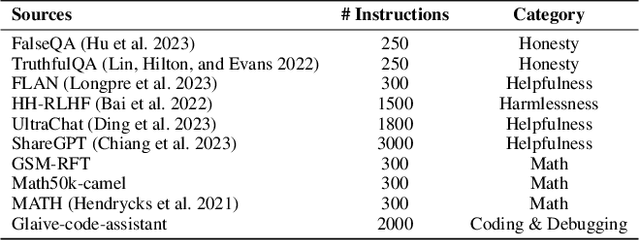
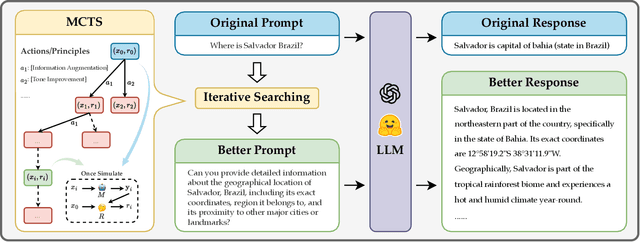
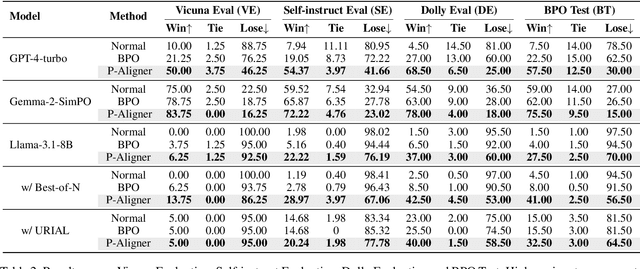
Large Language Models (LLMs) are expected to produce safe, helpful, and honest content during interaction with human users, but they frequently fail to align with such values when given flawed instructions, e.g., missing context, ambiguous directives, or inappropriate tone, leaving substantial room for improvement along multiple dimensions. A cost-effective yet high-impact way is to pre-align instructions before the model begins decoding. Existing approaches either rely on prohibitive test-time search costs or end-to-end model rewrite, which is powered by a customized training corpus with unclear objectives. In this work, we demonstrate that the goal of efficient and effective preference alignment can be achieved by P-Aligner, a lightweight module generating instructions that preserve the original intents while being expressed in a more human-preferred form. P-Aligner is trained on UltraPrompt, a new dataset synthesized via a proposed principle-guided pipeline using Monte-Carlo Tree Search, which systematically explores the space of candidate instructions that are closely tied to human preference. Experiments across different methods show that P-Aligner generally outperforms strong baselines across various models and benchmarks, including average win-rate gains of 28.35% and 8.69% on GPT-4-turbo and Gemma-2-SimPO, respectively. Further analyses validate its effectiveness and efficiency through multiple perspectives, including data quality, search strategies, iterative deployment, and time overhead.
QUITE: A Query Rewrite System Beyond Rules with LLM Agents
Jun 09, 2025Query rewrite transforms SQL queries into semantically equivalent forms that run more efficiently. Existing approaches mainly rely on predefined rewrite rules, but they handle a limited subset of queries and can cause performance regressions. This limitation stems from three challenges of rule-based query rewrite: (1) it is hard to discover and verify new rules, (2) fixed rewrite rules do not generalize to new query patterns, and (3) some rewrite techniques cannot be expressed as fixed rules. Motivated by the fact that human experts exhibit significantly better rewrite ability but suffer from scalability, and Large Language Models (LLMs) have demonstrated nearly human-level semantic and reasoning abilities, we propose a new approach of using LLMs to rewrite SQL queries beyond rules. Due to the hallucination problems in LLMs, directly applying LLMs often leads to nonequivalent and suboptimal queries. To address this issue, we propose QUITE (query rewrite), a training-free and feedback-aware system based on LLM agents that rewrites SQL queries into semantically equivalent forms with significantly better performance, covering a broader range of query patterns and rewrite strategies compared to rule-based methods. Firstly, we design a multi-agent framework controlled by a finite state machine (FSM) to equip LLMs with the ability to use external tools and enhance the rewrite process with real-time database feedback. Secondly, we develop a rewrite middleware to enhance the ability of LLMs to generate optimized query equivalents. Finally, we employ a novel hint injection technique to improve execution plans for rewritten queries. Extensive experiments show that QUITE reduces query execution time by up to 35.8% over state-of-the-art approaches and produces 24.1% more rewrites than prior methods, covering query cases that earlier systems did not handle.
Enhancing Code LLMs with Reinforcement Learning in Code Generation
Dec 29, 2024



With the rapid evolution of large language models (LLM), reinforcement learning (RL) has emerged as a pivotal technique for code generation and optimization in various domains. This paper presents a systematic survey of the application of RL in code optimization and generation, highlighting its role in enhancing compiler optimization, resource allocation, and the development of frameworks and tools. Subsequent sections first delve into the intricate processes of compiler optimization, where RL algorithms are leveraged to improve efficiency and resource utilization. The discussion then progresses to the function of RL in resource allocation, emphasizing register allocation and system optimization. We also explore the burgeoning role of frameworks and tools in code generation, examining how RL can be integrated to bolster their capabilities. This survey aims to serve as a comprehensive resource for researchers and practitioners interested in harnessing the power of RL to advance code generation and optimization techniques.
Electroadhesive Clutches for Programmable Shape Morphing of Soft Actuators
Nov 14, 2022



Soft robotic actuators are safe and adaptable devices with inherent compliance, which makes them attractive for manipulating delicate and complex objects. Researchers have integrated stiff materials into soft actuators to increase their force capacity and direct their deformation. However, these embedded materials have largely been pre-prescribed and static, which constrains the actuators to a predetermined range of motion. In this work, electroadhesive (EA) clutches integrated on a single-chamber soft pneumatic actuator (SPA) provide local programmable stiffness modulation to control the actuator deformation. We show that activating different clutch patterns inflates a silicone membrane into pyramidal, round, and plateau shapes. Curvatures from these shapes are combined during actuation to apply forces on both a 3.7 g and 820 g object along five different degrees of freedom (DoF). The actuator workspace is up to 12 mm for light objects. Clutch deactivation, which results in local elastomeric expansion, rapidly applies forces up to 3.2 N to an object resting on the surface and launches a 3.7 g object in controlled directions. The actuator also rotates a heavier, 820 g, object by 5 degrees and rapidly restores it to horizontal alignment after clutch deactivation. This actuator is fully powered by a 5 V battery, AA battery, DC-DC transformer, and 4.5 V (63 g) DC air pump. These results demonstrate a first step towards realizing a soft actuator with high DoF shape change that preserves the inherent benefits of pneumatic actuation while gaining the electrical controllability and strength of EA clutches. We envision such a system supplying human contact forces in the form of a low-profile sit-to-stand assistance device, bed-ridden patient manipulator, or other ergonomic mechanism. This technology was also demonstrated at ICRA 2022: https://www.youtube.com/watch?v=6Y6-iHWNi6s