 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHandelBot: Real-World Piano Playing via Fast Adaptation of Dexterous Robot Policies
Mar 12, 2026Mastering dexterous manipulation with multi-fingered hands has been a grand challenge in robotics for decades. Despite its potential, the difficulty of collecting high-quality data remains a primary bottleneck for high-precision tasks. While reinforcement learning and simulation-to-real-world transfer offer a promising alternative, the transferred policies often fail for tasks demanding millimeter-scale precision, such as bimanual piano playing. In this work, we introduce HandelBot, a framework that combines a simulation policy and rapid adaptation through a two-stage pipeline. Starting from a simulation-trained policy, we first apply a structured refinement stage to correct spatial alignments by adjusting lateral finger joints based on physical rollouts. Next, we use residual reinforcement learning to autonomously learn fine-grained corrective actions. Through extensive hardware experiments across five recognized songs, we demonstrate that HandelBot can successfully perform precise bimanual piano playing. Our system outperforms direct simulation deployment by a factor of 1.8x and requires only 30 minutes of physical interaction data.
SemanticFeels: Semantic Labeling during In-Hand Manipulation
Feb 15, 2026As robots become increasingly integrated into everyday tasks, their ability to perceive both the shape and properties of objects during in-hand manipulation becomes critical for adaptive and intelligent behavior. We present SemanticFeels, an extension of the NeuralFeels framework that integrates semantic labeling with neural implicit shape representation, from vision and touch. To illustrate its application, we focus on material classification: high-resolution Digit tactile readings are processed by a fine-tuned EfficientNet-B0 convolutional neural network (CNN) to generate local material predictions, which are then embedded into an augmented signed distance field (SDF) network that jointly predicts geometry and continuous material regions. Experimental results show that the system achieves a high correspondence between predicted and actual materials on both single- and multi-material objects, with an average matching accuracy of 79.87% across multiple manipulation trials on a multi-material object.
Coordinated Humanoid Manipulation with Choice Policies
Dec 31, 2025Humanoid robots hold great promise for operating in human-centric environments, yet achieving robust whole-body coordination across the head, hands, and legs remains a major challenge. We present a system that combines a modular teleoperation interface with a scalable learning framework to address this problem. Our teleoperation design decomposes humanoid control into intuitive submodules, which include hand-eye coordination, grasp primitives, arm end-effector tracking, and locomotion. This modularity allows us to collect high-quality demonstrations efficiently. Building on this, we introduce Choice Policy, an imitation learning approach that generates multiple candidate actions and learns to score them. This architecture enables both fast inference and effective modeling of multimodal behaviors. We validate our approach on two real-world tasks: dishwasher loading and whole-body loco-manipulation for whiteboard wiping. Experiments show that Choice Policy significantly outperforms diffusion policies and standard behavior cloning. Furthermore, our results indicate that hand-eye coordination is critical for success in long-horizon tasks. Our work demonstrates a practical path toward scalable data collection and learning for coordinated humanoid manipulation in unstructured environments.
OSMO: Open-Source Tactile Glove for Human-to-Robot Skill Transfer
Dec 09, 2025Human video demonstrations provide abundant training data for learning robot policies, but video alone cannot capture the rich contact signals critical for mastering manipulation. We introduce OSMO, an open-source wearable tactile glove designed for human-to-robot skill transfer. The glove features 12 three-axis tactile sensors across the fingertips and palm and is designed to be compatible with state-of-the-art hand-tracking methods for in-the-wild data collection. We demonstrate that a robot policy trained exclusively on human demonstrations collected with OSMO, without any real robot data, is capable of executing a challenging contact-rich manipulation task. By equipping both the human and the robot with the same glove, OSMO minimizes the visual and tactile embodiment gap, enabling the transfer of continuous shear and normal force feedback while avoiding the need for image inpainting or other vision-based force inference. On a real-world wiping task requiring sustained contact pressure, our tactile-aware policy achieves a 72% success rate, outperforming vision-only baselines by eliminating contact-related failure modes. We release complete hardware designs, firmware, and assembly instructions to support community adoption.
SPIDER: Scalable Physics-Informed Dexterous Retargeting
Nov 12, 2025Learning dexterous and agile policy for humanoid and dexterous hand control requires large-scale demonstrations, but collecting robot-specific data is prohibitively expensive. In contrast, abundant human motion data is readily available from motion capture, videos, and virtual reality, which could help address the data scarcity problem. However, due to the embodiment gap and missing dynamic information like force and torque, these demonstrations cannot be directly executed on robots. To bridge this gap, we propose Scalable Physics-Informed DExterous Retargeting (SPIDER), a physics-based retargeting framework to transform and augment kinematic-only human demonstrations to dynamically feasible robot trajectories at scale. Our key insight is that human demonstrations should provide global task structure and objective, while large-scale physics-based sampling with curriculum-style virtual contact guidance should refine trajectories to ensure dynamical feasibility and correct contact sequences. SPIDER scales across diverse 9 humanoid/dexterous hand embodiments and 6 datasets, improving success rates by 18% compared to standard sampling, while being 10X faster than reinforcement learning (RL) baselines, and enabling the generation of a 2.4M frames dynamic-feasible robot dataset for policy learning. As a universal physics-based retargeting method, SPIDER can work with diverse quality data and generate diverse and high-quality data to enable efficient policy learning with methods like RL.
From Simple to Complex Skills: The Case of In-Hand Object Reorientation
Jan 09, 2025



Learning policies in simulation and transferring them to the real world has become a promising approach in dexterous manipulation. However, bridging the sim-to-real gap for each new task requires substantial human effort, such as careful reward engineering, hyperparameter tuning, and system identification. In this work, we present a system that leverages low-level skills to address these challenges for more complex tasks. Specifically, we introduce a hierarchical policy for in-hand object reorientation based on previously acquired rotation skills. This hierarchical policy learns to select which low-level skill to execute based on feedback from both the environment and the low-level skill policies themselves. Compared to learning from scratch, the hierarchical policy is more robust to out-of-distribution changes and transfers easily from simulation to real-world environments. Additionally, we propose a generalizable object pose estimator that uses proprioceptive information, low-level skill predictions, and control errors as inputs to estimate the object pose over time. We demonstrate that our system can reorient objects, including symmetrical and textureless ones, to a desired pose.
Digitizing Touch with an Artificial Multimodal Fingertip
Nov 04, 2024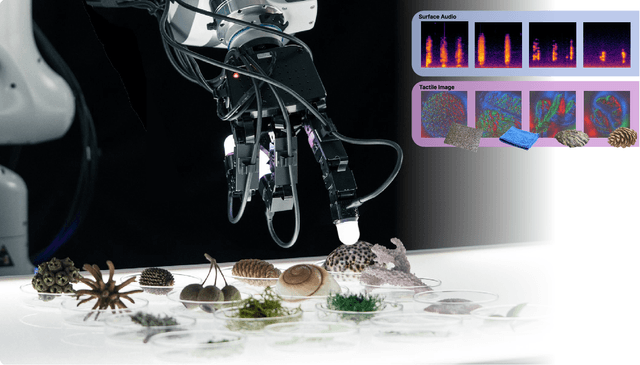

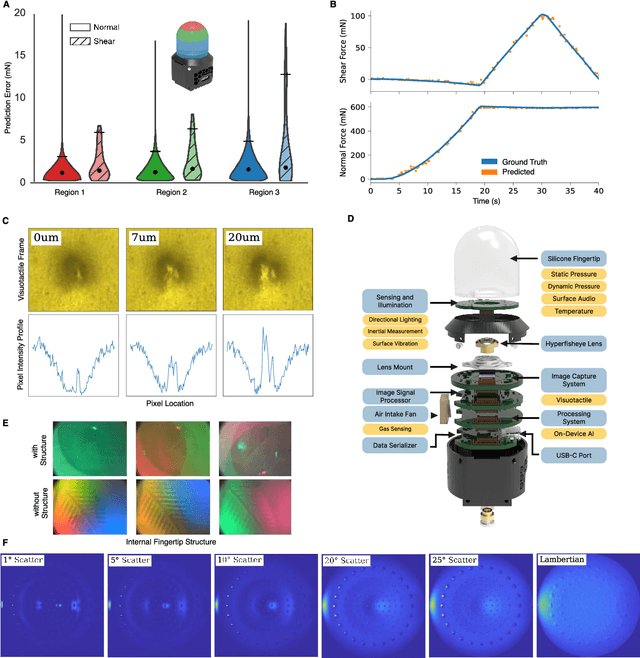

Touch is a crucial sensing modality that provides rich information about object properties and interactions with the physical environment. Humans and robots both benefit from using touch to perceive and interact with the surrounding environment (Johansson and Flanagan, 2009; Li et al., 2020; Calandra et al., 2017). However, no existing systems provide rich, multi-modal digital touch-sensing capabilities through a hemispherical compliant embodiment. Here, we describe several conceptual and technological innovations to improve the digitization of touch. These advances are embodied in an artificial finger-shaped sensor with advanced sensing capabilities. Significantly, this fingertip contains high-resolution sensors (~8.3 million taxels) that respond to omnidirectional touch, capture multi-modal signals, and use on-device artificial intelligence to process the data in real time. Evaluations show that the artificial fingertip can resolve spatial features as small as 7 um, sense normal and shear forces with a resolution of 1.01 mN and 1.27 mN, respectively, perceive vibrations up to 10 kHz, sense heat, and even sense odor. Furthermore, it embeds an on-device AI neural network accelerator that acts as a peripheral nervous system on a robot and mimics the reflex arc found in humans. These results demonstrate the possibility of digitizing touch with superhuman performance. The implications are profound, and we anticipate potential applications in robotics (industrial, medical, agricultural, and consumer-level), virtual reality and telepresence, prosthetics, and e-commerce. Toward digitizing touch at scale, we open-source a modular platform to facilitate future research on the nature of touch.
Hand-Object Interaction Pretraining from Videos
Sep 12, 2024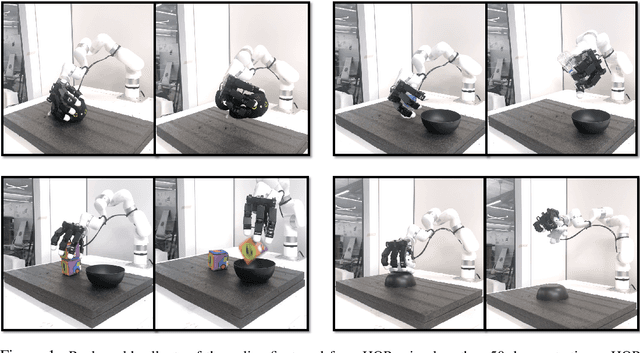
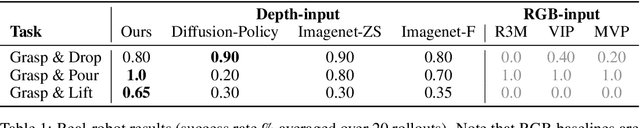
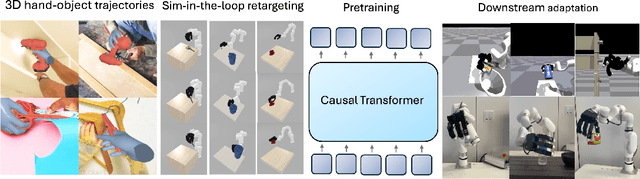

We present an approach to learn general robot manipulation priors from 3D hand-object interaction trajectories. We build a framework to use in-the-wild videos to generate sensorimotor robot trajectories. We do so by lifting both the human hand and the manipulated object in a shared 3D space and retargeting human motions to robot actions. Generative modeling on this data gives us a task-agnostic base policy. This policy captures a general yet flexible manipulation prior. We empirically demonstrate that finetuning this policy, with both reinforcement learning (RL) and behavior cloning (BC), enables sample-efficient adaptation to downstream tasks and simultaneously improves robustness and generalizability compared to prior approaches. Qualitative experiments are available at: \url{https://hgaurav2k.github.io/hop/}.
Lessons from Learning to Spin "Pens"
Jul 26, 2024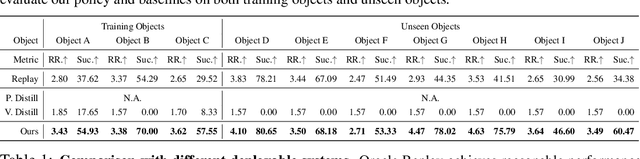
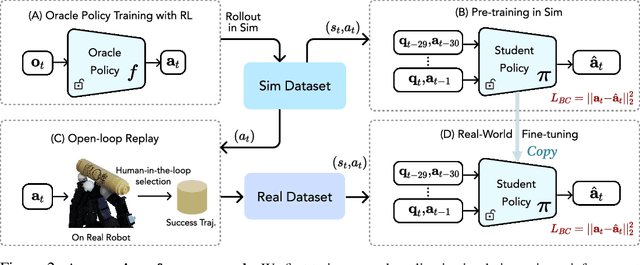

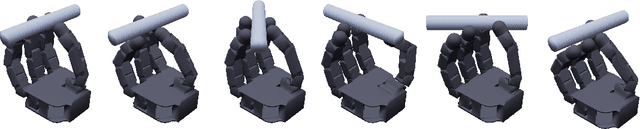
In-hand manipulation of pen-like objects is an important skill in our daily lives, as many tools such as hammers and screwdrivers are similarly shaped. However, current learning-based methods struggle with this task due to a lack of high-quality demonstrations and the significant gap between simulation and the real world. In this work, we push the boundaries of learning-based in-hand manipulation systems by demonstrating the capability to spin pen-like objects. We first use reinforcement learning to train an oracle policy with privileged information and generate a high-fidelity trajectory dataset in simulation. This serves two purposes: 1) pre-training a sensorimotor policy in simulation; 2) conducting open-loop trajectory replay in the real world. We then fine-tune the sensorimotor policy using these real-world trajectories to adapt it to the real world dynamics. With less than 50 trajectories, our policy learns to rotate more than ten pen-like objects with different physical properties for multiple revolutions. We present a comprehensive analysis of our design choices and share the lessons learned during development.
Learning In-Hand Translation Using Tactile Skin With Shear and Normal Force Sensing
Jul 10, 2024Recent progress in reinforcement learning (RL) and tactile sensing has significantly advanced dexterous manipulation. However, these methods often utilize simplified tactile signals due to the gap between tactile simulation and the real world. We introduce a sensor model for tactile skin that enables zero-shot sim-to-real transfer of ternary shear and binary normal forces. Using this model, we develop an RL policy that leverages sliding contact for dexterous in-hand translation. We conduct extensive real-world experiments to assess how tactile sensing facilitates policy adaptation to various unseen object properties and robot hand orientations. We demonstrate that our 3-axis tactile policies consistently outperform baselines that use only shear forces, only normal forces, or only proprioception. Website: https://jessicayin.github.io/tactile-skin-rl/