 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurrogate-Based Differentiable Pipeline for Shape Optimization
Nov 13, 2025Gradient-based optimization of engineering designs is limited by non-differentiable components in the typical computer-aided engineering (CAE) workflow, which calculates performance metrics from design parameters. While gradient-based methods could provide noticeable speed-ups in high-dimensional design spaces, codes for meshing, physical simulations, and other common components are not differentiable even if the math or physics underneath them is. We propose replacing non-differentiable pipeline components with surrogate models which are inherently differentiable. Using a toy example of aerodynamic shape optimization, we demonstrate an end-to-end differentiable pipeline where a 3D U-Net full-field surrogate replaces both meshing and simulation steps by training it on the mapping between the signed distance field (SDF) of the shape and the fields of interest. This approach enables gradient-based shape optimization without the need for differentiable solvers, which can be useful in situations where adjoint methods are unavailable and/or hard to implement.
Digitizing Touch with an Artificial Multimodal Fingertip
Nov 04, 2024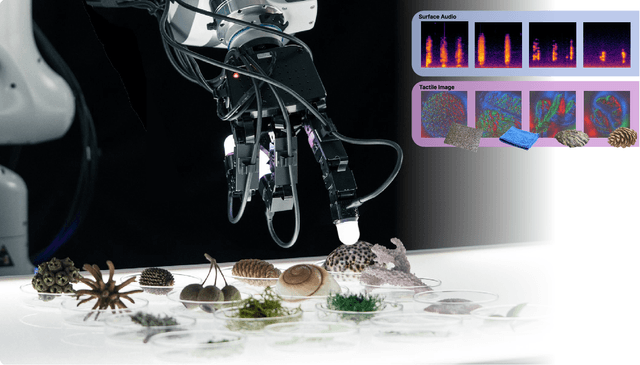

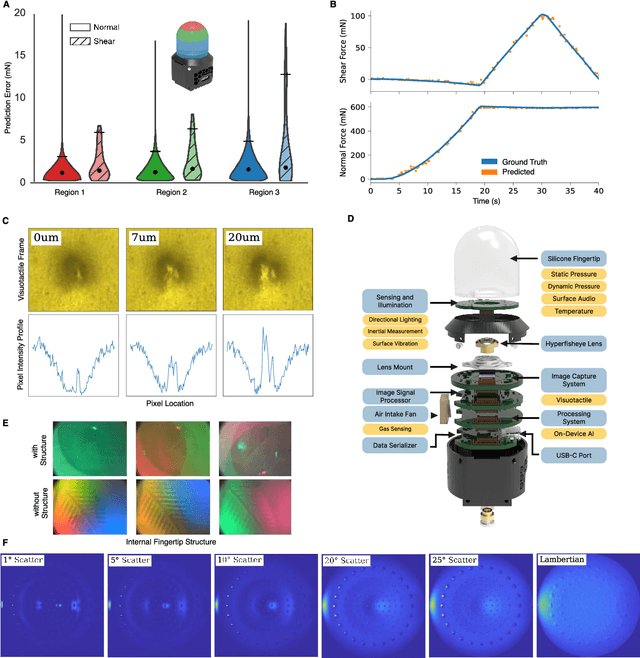

Touch is a crucial sensing modality that provides rich information about object properties and interactions with the physical environment. Humans and robots both benefit from using touch to perceive and interact with the surrounding environment (Johansson and Flanagan, 2009; Li et al., 2020; Calandra et al., 2017). However, no existing systems provide rich, multi-modal digital touch-sensing capabilities through a hemispherical compliant embodiment. Here, we describe several conceptual and technological innovations to improve the digitization of touch. These advances are embodied in an artificial finger-shaped sensor with advanced sensing capabilities. Significantly, this fingertip contains high-resolution sensors (~8.3 million taxels) that respond to omnidirectional touch, capture multi-modal signals, and use on-device artificial intelligence to process the data in real time. Evaluations show that the artificial fingertip can resolve spatial features as small as 7 um, sense normal and shear forces with a resolution of 1.01 mN and 1.27 mN, respectively, perceive vibrations up to 10 kHz, sense heat, and even sense odor. Furthermore, it embeds an on-device AI neural network accelerator that acts as a peripheral nervous system on a robot and mimics the reflex arc found in humans. These results demonstrate the possibility of digitizing touch with superhuman performance. The implications are profound, and we anticipate potential applications in robotics (industrial, medical, agricultural, and consumer-level), virtual reality and telepresence, prosthetics, and e-commerce. Toward digitizing touch at scale, we open-source a modular platform to facilitate future research on the nature of touch.