 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeACE: A Cross-Platform Visual-Exoskeletons System for Low-Cost Dexterous Teleoperation
Paper and Code
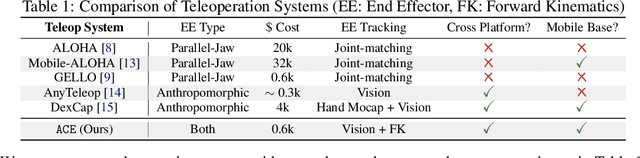


Learning from demonstrations has shown to be an effective approach to robotic manipulation, especially with the recently collected large-scale robot data with teleoperation systems. Building an efficient teleoperation system across diverse robot platforms has become more crucial than ever. However, there is a notable lack of cost-effective and user-friendly teleoperation systems for different end-effectors, e.g., anthropomorphic robot hands and grippers, that can operate across multiple platforms. To address this issue, we develop ACE, a cross-platform visual-exoskeleton system for low-cost dexterous teleoperation. Our system utilizes a hand-facing camera to capture 3D hand poses and an exoskeleton mounted on a portable base, enabling accurate real-time capture of both finger and wrist poses. Compared to previous systems, which often require hardware customization according to different robots, our single system can generalize to humanoid hands, arm-hands, arm-gripper, and quadruped-gripper systems with high-precision teleoperation. This enables imitation learning for complex manipulation tasks on diverse platforms.