 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatio-Temporal Reconnection for Multi-Robot Networks using Adaptive Prescribed-Time CBFs
Jun 01, 2026In multi-robot systems, maintaining persistent communication graph connectivity is often overly restrictive, especially when robots have limited communication ranges but operate in large environments. Instead, allowing robots to temporarily disconnect and later reconnect is often more desirable for efficient task execution while still ensuring timely information sharing across the team. In this paper, we propose an adaptive prescribed-time control barrier function (adaptive PT-CBF) framework that enables robots to temporarily disconnect and re-enter the communication range within an adjustable and feasible prescribed time. Moreover, we introduce a reconnection triggering mechanism that jointly considers task execution and reconnection urgency, thereby providing a principled way to decide when reconnection should occur. Theoretical analysis justifies convergence to the satisfying reconnection within a prescribed finite time. Experimental results validate the performance of our proposed adaptive PT-CBF with improved task efficiency and satisfying reconnections.
Geometry-Aware Control Barrier Functions for Collision Avoidance via Bernstein Polynomial Approximations
May 29, 2026Safe navigation often relies on well-defined conditions based on the shape of robots and obstacles, and can be challenging when they have irregular geometries. While Control Barrier Functions (CBFs) offer an efficient mechanism to enforce safe set forward invariance, common shape surrogates (e.g., spheres or super-ellipsoids) either are overly conservative in unstructured scenes or require many local primitives, which inflates constraint counts and degrades real-time performance. In this paper, we introduce a novel geometry-aware Control Barrier Function (CBF) based on Bernstein-Polynomial Signed Distance Fields (BP-SDFs). It provides a unified way to represent the obstacles and robots, so as to represent the barrier function with a unified minimum distance. Benefiting from the differentiability of the Bernstein polynomials, one can easily enforce the control constraints in a closed loop. We validate the method's efficiency and performance to guarantee safety in single-robot navigation and heterogeneous multi-robot collision avoidance via simulations under different environments.
Capability-Aware Heterogeneous Control Barrier Functions for Decentralized Multi-Robot Safe Navigation
Apr 14, 2026Safe navigation for multi-robot systems requires enforcing safety without sacrificing task efficiency under decentralized decision-making. Existing decentralized methods often assume robot homogeneity, making shared safety requirements non-uniformly interpreted across heterogeneous agents with structurally different dynamics, which could lead to avoidance obligations not physically realizable for some robots and thus cause safety violations or deadlock. In this paper, we propose Capability-Aware Heterogeneous Control Barrier Function (CA-HCBF), a decentralized framework for consistent safety enforcement and capability-aware coordination in heterogeneous robot teams. We derive a canonical second-order control-affine representation that unifies holonomic and nonholonomic robots under acceleration-level control via canonical transformation and backstepping, preserving forward invariance of the safe set while avoiding relative-degree mismatch across heterogeneous dynamics. We further introduce a support-function-based directional capability metric that quantifies each robot's ability to follow its motion intent, deriving a pairwise responsibility allocation that distributes the safety burden proportionally to each robot's motion capability. A feasibility-aware clipping mechanism further constrains the allocation to each agent's physically achievable range, mitigating infeasible constraint assignments common in dense decentralized CBF settings. Simulations with up to 30 heterogeneous robots and a physical multi-robot demonstration show improved safety and task efficiency over baselines, validating real-world applicability across robots with distinct kinematic constraints.
Integrating Online Learning and Connectivity Maintenance for Communication-Aware Multi-Robot Coordination
Oct 08, 2024



This paper proposes a novel data-driven control strategy for maintaining connectivity in networked multi-robot systems. Existing approaches often rely on a pre-determined communication model specifying whether pairwise robots can communicate given their relative distance to guide the connectivity-aware control design, which may not capture real-world communication conditions. To relax that assumption, we present the concept of Data-driven Connectivity Barrier Certificates, which utilize Control Barrier Functions (CBF) and Gaussian Processes (GP) to characterize the admissible control space for pairwise robots based on communication performance observed online. This allows robots to maintain a satisfying level of pairwise communication quality (measured by the received signal strength) while in motion. Then we propose a Data-driven Connectivity Maintenance (DCM) algorithm that combines (1) online learning of the communication signal strength and (2) a bi-level optimization-based control framework for the robot team to enforce global connectivity of the realistic multi-robot communication graph and minimally deviate from their task-related motions. We provide theoretical proofs to justify the properties of our algorithm and demonstrate its effectiveness through simulations with up to 20 robots.
Courteous MPC for Autonomous Driving with CBF-inspired Risk Assessment
Aug 23, 2024



With more autonomous vehicles (AVs) sharing roadways with human-driven vehicles (HVs), ensuring safe and courteous maneuvers that respect HVs' behavior becomes increasingly important. To promote both safety and courtesy in AV's behavior, an extension of Control Barrier Functions (CBFs)-inspired risk evaluation framework is proposed in this paper by considering both noisy observed positions and velocities of surrounding vehicles. The perceived risk by the ego vehicle can be visualized as a risk map that reflects the understanding of the surrounding environment and thus shows the potential for facilitating safe and courteous driving. By incorporating the risk evaluation framework into the Model Predictive Control (MPC) scheme, we propose a Courteous MPC for ego AV to generate courteous behaviors that 1) reduce the overall risk imposed on other vehicles and 2) respect the hard safety constraints and the original objective for efficiency. We demonstrate the performance of the proposed Courteous MPC via theoretical analysis and simulation experiments.
Safety-Critical Control with Uncertainty Quantification using Adaptive Conformal Prediction
Jul 04, 2024



Safety assurance is critical in the planning and control of robotic systems. For robots operating in the real world, the safety-critical design often needs to explicitly address uncertainties and the pre-computed guarantees often rely on the assumption of the particular distribution of the uncertainty. However, it is difficult to characterize the actual uncertainty distribution beforehand and thus the established safety guarantee may be violated due to possible distribution mismatch. In this paper, we propose a novel safe control framework that provides a high-probability safety guarantee for stochastic dynamical systems following unknown distributions of motion noise. Specifically, this framework adopts adaptive conformal prediction to dynamically quantify the prediction uncertainty from online observations and combines that with the probabilistic extension of the control barrier functions (CBFs) to characterize the uncertainty-aware control constraints. By integrating the constraints in the model predictive control scheme, it allows robots to adaptively capture the true prediction uncertainty online in a distribution-free setting and enjoys formally provable high-probability safety assurance. Simulation results on multi-robot systems with stochastic single-integrator dynamics and unicycle dynamics are provided to demonstrate the effectiveness of our framework.
Decentralized Multi-Robot Line-of-Sight Connectivity Maintenance under Uncertainty
Jun 18, 2024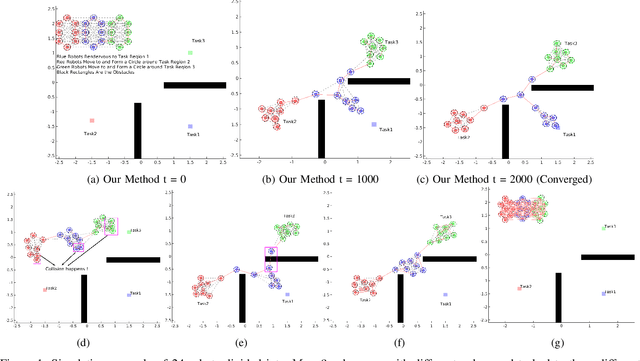



In this paper, we propose a novel decentralized control method to maintain Line-of-Sight connectivity for multi-robot networks in the presence of Guassian-distributed localization uncertainty. In contrast to most existing work that assumes perfect positional information about robots or enforces overly restrictive rigid formation against uncertainty, our method enables robots to preserve Line-of-Sight connectivity with high probability under unbounded Gaussian-like positional noises while remaining minimally intrusive to the original robots' tasks. This is achieved by a motion coordination framework that jointly optimizes the set of existing Line-of-Sight edges to preserve and control revisions to the nominal task-related controllers, subject to the safety constraints and the corresponding composition of uncertainty-aware Line-of-Sight control constraints. Such compositional control constraints, expressed by our novel notion of probabilistic Line-of-Sight connectivity barrier certificates (PrLOS-CBC) for pairwise robots using control barrier functions, explicitly characterize the deterministic admissible control space for the two robots. The resulting motion ensures Line-of-Sight connectedness for the robot team with high probability. Furthermore, we propose a fully decentralized algorithm that decomposes the motion coordination framework by interleaving the composite constraint specification and solving for the resulting optimization-based controllers. The optimality of our approach is justified by the theoretical proofs. Simulation and real-world experiments results are given to demonstrate the effectiveness of our method.
IFA: Interaction Fidelity Attention for Entire Lifelong Behaviour Sequence Modeling
Jun 14, 2024The lifelong user behavior sequence provides abundant information of user preference and gains impressive improvement in the recommendation task, however increases computational consumption significantly. To meet the severe latency requirement in online service, a short sub-sequence is sampled based on similarity to the target item. Unfortunately, items not in the sub-sequence are abandoned, leading to serious information loss. In this paper, we propose a new efficient paradigm to model the full lifelong sequence, which is named as \textbf{I}nteraction \textbf{F}idelity \textbf{A}ttention (\textbf{IFA}). In IFA, we input all target items in the candidate set into the model at once, and leverage linear transformer to reduce the time complexity of the cross attention between the candidate set and the sequence without any interaction information loss. We also additionally model the relationship of all target items for optimal set generation, and design loss function for better consistency of training and inference. We demonstrate the effectiveness and efficiency of our model by off-line and online experiments in the recommender system of Kuaishou.
Occlusion-Free Image Based Visual Servoing using Probabilistic Control Barrier Certificates
Sep 07, 2023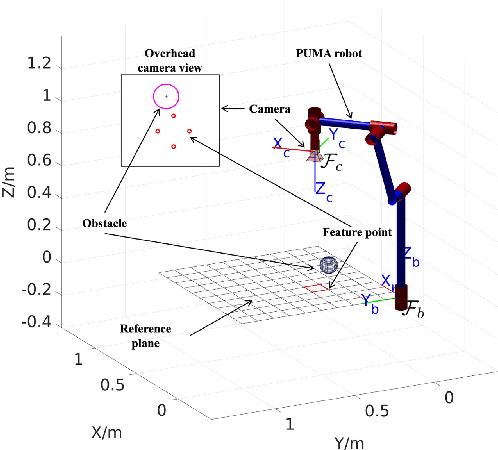
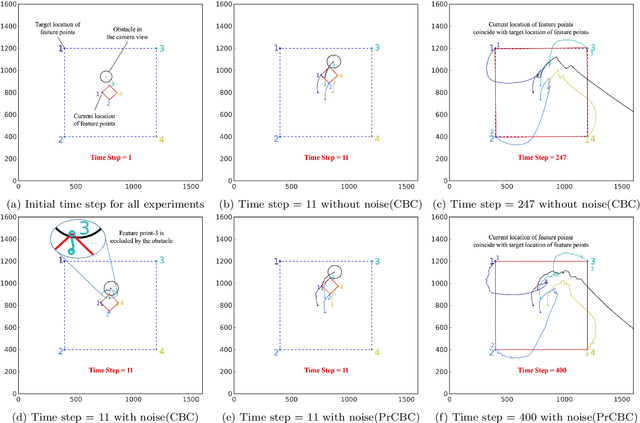
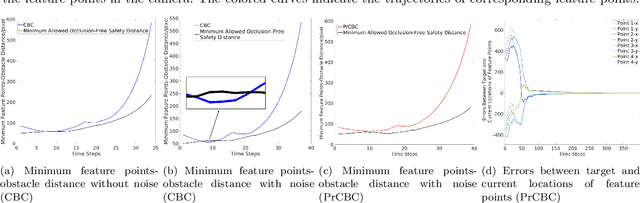
Image-based visual servoing (IBVS) is a widely-used approach in robotics that employs visual information to guide robots towards desired positions. However, occlusions in this approach can lead to visual servoing failure and degrade the control performance due to the obstructed vision feature points that are essential for providing visual feedback. In this paper, we propose a Control Barrier Function (CBF) based controller that enables occlusion-free IBVS tasks by automatically adjusting the robot's configuration to keep the feature points in the field of view and away from obstacles. In particular, to account for measurement noise of the feature points, we develop the Probabilistic Control Barrier Certificates (PrCBC) using control barrier functions that encode the chance-constrained occlusion avoidance constraints under uncertainty into deterministic admissible control space for the robot, from which the resulting configuration of robot ensures that the feature points stay occlusion free from obstacles with a satisfying predefined probability. By integrating such constraints with a Model Predictive Control (MPC) framework, the sequence of optimized control inputs can be derived to achieve the primary IBVS task while enforcing the occlusion avoidance during robot movements. Simulation results are provided to validate the performance of our proposed method.