 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJade: A Differentiable Physics Engine for Articulated Rigid Bodies with Intersection-Free Frictional Contact
Paper and Code
Sep 09, 2023
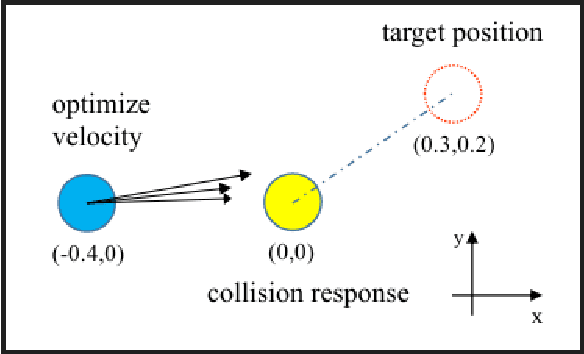
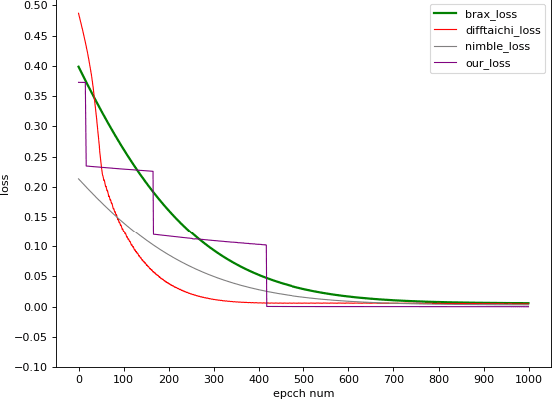
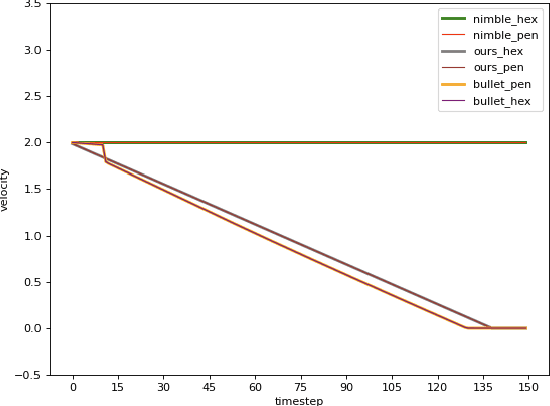
We present Jade, a differentiable physics engine for articulated rigid bodies. Jade models contacts as the Linear Complementarity Problem (LCP). Compared to existing differentiable simulations, Jade offers features including intersection-free collision simulation and stable LCP solutions for multiple frictional contacts. We use continuous collision detection to detect the time of impact and adopt the backtracking strategy to prevent intersection between bodies with complex geometry shapes. We derive the gradient calculation to ensure the whole simulation process is differentiable under the backtracking mechanism. We modify the popular Dantzig algorithm to get valid solutions under multiple frictional contacts. We conduct extensive experiments to demonstrate the effectiveness of our differentiable physics simulation over a variety of contact-rich tasks.