 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReThinker: Scientific Reasoning by Rethinking with Guided Reflection and Confidence Control
Feb 04, 2026Expert-level scientific reasoning remains challenging for large language models, particularly on benchmarks such as Humanity's Last Exam (HLE), where rigid tool pipelines, brittle multi-agent coordination, and inefficient test-time scaling often limit performance. We introduce ReThinker, a confidence-aware agentic framework that orchestrates retrieval, tool use, and multi-agent reasoning through a stage-wise Solver-Critic-Selector architecture. Rather than following a fixed pipeline, ReThinker dynamically allocates computation based on model confidence, enabling adaptive tool invocation, guided multi-dimensional reflection, and robust confidence-weighted selection. To support scalable training without human annotation, we further propose a reverse data synthesis pipeline and an adaptive trajectory recycling strategy that transform successful reasoning traces into high-quality supervision. Experiments on HLE, GAIA, and XBench demonstrate that ReThinker consistently outperforms state-of-the-art foundation models with tools and existing deep research systems, achieving state-of-the-art results on expert-level reasoning tasks.
From Text to Simulation: A Multi-Agent LLM Workflow for Automated Chemical Process Design
Jan 11, 2026Process simulation is a critical cornerstone of chemical engineering design. Current automated chemical design methodologies focus mainly on various representations of process flow diagrams. However, transforming these diagrams into executable simulation flowsheets remains a time-consuming and labor-intensive endeavor, requiring extensive manual parameter configuration within simulation software. In this work, we propose a novel multi-agent workflow that leverages the semantic understanding capabilities of large language models(LLMs) and enables iterative interactions with chemical process simulation software, achieving end-to-end automated simulation from textual process specifications to computationally validated software configurations for design enhancement. Our approach integrates four specialized agents responsible for task understanding, topology generation, parameter configuration, and evaluation analysis, respectively, coupled with Enhanced Monte Carlo Tree Search to accurately interpret semantics and robustly generate configurations. Evaluated on Simona, a large-scale process description dataset, our method achieves a 31.1% improvement in the simulation convergence rate compared to state-of-the-art baselines and reduces the design time by 89. 0% compared to the expert manual design. This work demonstrates the potential of AI-assisted chemical process design, which bridges the gap between conceptual design and practical implementation. Our workflow is applicable to diverse process-oriented industries, including pharmaceuticals, petrochemicals, food processing, and manufacturing, offering a generalizable solution for automated process design.
From Watch to Imagine: Steering Long-horizon Manipulation via Human Demonstration and Future Envisionment
Sep 26, 2025Generalizing to long-horizon manipulation tasks in a zero-shot setting remains a central challenge in robotics. Current multimodal foundation based approaches, despite their capabilities, typically fail to decompose high-level commands into executable action sequences from static visual input alone. To address this challenge, we introduce Super-Mimic, a hierarchical framework that enables zero-shot robotic imitation by directly inferring procedural intent from unscripted human demonstration videos. Our framework is composed of two sequential modules. First, a Human Intent Translator (HIT) parses the input video using multimodal reasoning to produce a sequence of language-grounded subtasks. These subtasks then condition a Future Dynamics Predictor (FDP), which employs a generative model that synthesizes a physically plausible video rollout for each step. The resulting visual trajectories are dynamics-aware, explicitly modeling crucial object interactions and contact points to guide the low-level controller. We validate this approach through extensive experiments on a suite of long-horizon manipulation tasks, where Super-Mimic significantly outperforms state-of-the-art zero-shot methods by over 20\%. These results establish that coupling video-driven intent parsing with prospective dynamics modeling is a highly effective strategy for developing general-purpose robotic systems.
Can External Validation Tools Improve Annotation Quality for LLM-as-a-Judge?
Jul 22, 2025Pairwise preferences over model responses are widely collected to evaluate and provide feedback to large language models (LLMs). Given two alternative model responses to the same input, a human or AI annotator selects the "better" response. This approach can provide feedback for domains where other hard-coded metrics are difficult to obtain (e.g., chat response quality), thereby helping model evaluation or training. However, for some domains high-quality pairwise comparisons can be tricky to obtain - from AI and humans. For example, for responses with many factual statements, annotators may disproportionately weigh writing quality rather than underlying facts. In this work, we explore augmenting standard AI annotator systems with additional tools to improve performance on three challenging response domains: long-form factual, math and code tasks. We propose a tool-using agentic system to provide higher quality feedback on these domains. Our system uses web-search and code execution to ground itself based on external validation, independent of the LLM's internal knowledge and biases. We provide extensive experimental results evaluating our method across the three targeted response domains as well as general annotation tasks, using RewardBench (incl. AlpacaEval and LLMBar), RewardMath, as well as three new datasets for domains with saturated pre-existing datasets. Our results indicate that external tools can indeed improve performance in many, but not all, cases. More generally, our experiments highlight the sensitivity of performance to simple parameters (e.g., prompt) and the need for improved (non-saturated) annotator benchmarks. We share our code at https://github.com/apple/ml-agent-evaluator.
Exploring the Limits of Vision-Language-Action Manipulations in Cross-task Generalization
May 21, 2025The generalization capabilities of vision-language-action (VLA) models to unseen tasks are crucial to achieving general-purpose robotic manipulation in open-world settings. However, the cross-task generalization capabilities of existing VLA models remain significantly underexplored. To address this gap, we introduce AGNOSTOS, a novel simulation benchmark designed to rigorously evaluate cross-task zero-shot generalization in manipulation. AGNOSTOS comprises 23 unseen manipulation tasks for testing, distinct from common training task distributions, and incorporates two levels of generalization difficulty to assess robustness. Our systematic evaluation reveals that current VLA models, despite being trained on diverse datasets, struggle to generalize effectively to these unseen tasks. To overcome this limitation, we propose Cross-Task In-Context Manipulation (X-ICM), a method that conditions large language models (LLMs) on in-context demonstrations from seen tasks to predict action sequences for unseen tasks. Additionally, we introduce a dynamics-guided sample selection strategy that identifies relevant demonstrations by capturing cross-task dynamics. On AGNOSTOS, X-ICM significantly improves cross-task zero-shot generalization performance over leading VLAs. We believe AGNOSTOS and X-ICM will serve as valuable tools for advancing general-purpose robotic manipulation.
EGP3D: Edge-guided Geometric Preserving 3D Point Cloud Super-resolution for RGB-D camera
Dec 16, 2024



Point clouds or depth images captured by current RGB-D cameras often suffer from low resolution, rendering them insufficient for applications such as 3D reconstruction and robots. Existing point cloud super-resolution (PCSR) methods are either constrained by geometric artifacts or lack attention to edge details. To address these issues, we propose an edge-guided geometric-preserving 3D point cloud super-resolution (EGP3D) method tailored for RGB-D cameras. Our approach innovatively optimizes the point cloud with an edge constraint on a projected 2D space, thereby ensuring high-quality edge preservation in the 3D PCSR task. To tackle geometric optimization challenges in super-resolution point clouds, particularly preserving edge shapes and smoothness, we introduce a multi-faceted loss function that simultaneously optimizes the Chamfer distance, Hausdorff distance, and gradient smoothness. Existing datasets used for point cloud upsampling are predominantly synthetic and inadequately represent real-world scenarios, neglecting noise and stray light effects. To address the scarcity of realistic RGB-D data for PCSR tasks, we built a dataset that captures real-world noise and stray-light effects, offering a more accurate representation of authentic environments. Validated through simulations and real-world experiments, the proposed method exhibited superior performance in preserving edge clarity and geometric details.
I2EBench: A Comprehensive Benchmark for Instruction-based Image Editing
Aug 26, 2024



Significant progress has been made in the field of Instruction-based Image Editing (IIE). However, evaluating these models poses a significant challenge. A crucial requirement in this field is the establishment of a comprehensive evaluation benchmark for accurately assessing editing results and providing valuable insights for its further development. In response to this need, we propose I2EBench, a comprehensive benchmark designed to automatically evaluate the quality of edited images produced by IIE models from multiple dimensions. I2EBench consists of 2,000+ images for editing, along with 4,000+ corresponding original and diverse instructions. It offers three distinctive characteristics: 1) Comprehensive Evaluation Dimensions: I2EBench comprises 16 evaluation dimensions that cover both high-level and low-level aspects, providing a comprehensive assessment of each IIE model. 2) Human Perception Alignment: To ensure the alignment of our benchmark with human perception, we conducted an extensive user study for each evaluation dimension. 3) Valuable Research Insights: By analyzing the advantages and disadvantages of existing IIE models across the 16 dimensions, we offer valuable research insights to guide future development in the field. We will open-source I2EBench, including all instructions, input images, human annotations, edited images from all evaluated methods, and a simple script for evaluating the results from new IIE models. The code, dataset and generated images from all IIE models are provided in github: https://github.com/cocoshe/I2EBench.
Apple Intelligence Foundation Language Models
Jul 29, 2024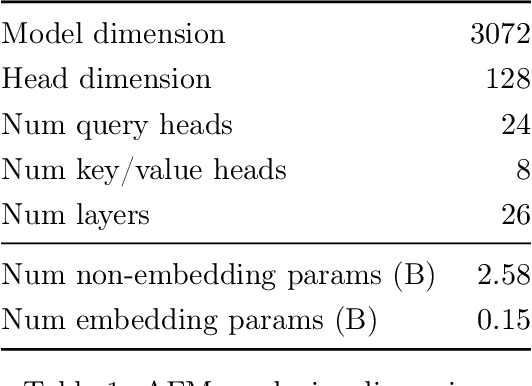
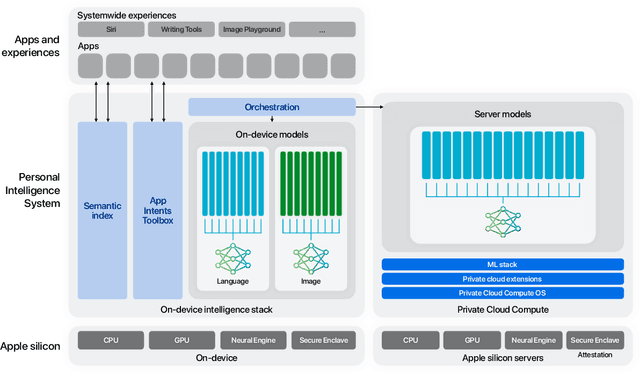

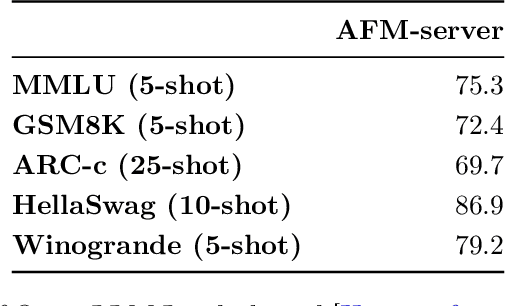
We present foundation language models developed to power Apple Intelligence features, including a ~3 billion parameter model designed to run efficiently on devices and a large server-based language model designed for Private Cloud Compute. These models are designed to perform a wide range of tasks efficiently, accurately, and responsibly. This report describes the model architecture, the data used to train the model, the training process, how the models are optimized for inference, and the evaluation results. We highlight our focus on Responsible AI and how the principles are applied throughout the model development.
SpacTor-T5: Pre-training T5 Models with Span Corruption and Replaced Token Detection
Jan 24, 2024Pre-training large language models is known to be extremely resource intensive and often times inefficient, under-utilizing the information encapsulated in the training text sequences. In this paper, we present SpacTor, a new training procedure consisting of (1) a hybrid objective combining span corruption (SC) and token replacement detection (RTD), and (2) a two-stage curriculum that optimizes the hybrid objective over the initial $\tau$ iterations, then transitions to standard SC loss. We show empirically that the effectiveness of the hybrid objective is tied to the two-stage pre-training schedule, and provide extensive analysis on why this is the case. In our experiments with encoder-decoder architectures (T5) on a variety of NLP tasks, SpacTor-T5 yields the same downstream performance as standard SC pre-training, while enabling a 50% reduction in pre-training iterations and 40% reduction in total FLOPs. Alternatively, given the same amount of computing budget, we find that SpacTor results in significantly improved downstream benchmark performance.
FFINet: Future Feedback Interaction Network for Motion Forecasting
Nov 08, 2023Motion forecasting plays a crucial role in autonomous driving, with the aim of predicting the future reasonable motions of traffic agents. Most existing methods mainly model the historical interactions between agents and the environment, and predict multi-modal trajectories in a feedforward process, ignoring potential trajectory changes caused by future interactions between agents. In this paper, we propose a novel Future Feedback Interaction Network (FFINet) to aggregate features the current observations and potential future interactions for trajectory prediction. Firstly, we employ different spatial-temporal encoders to embed the decomposed position vectors and the current position of each scene, providing rich features for the subsequent cross-temporal aggregation. Secondly, the relative interaction and cross-temporal aggregation strategies are sequentially adopted to integrate features in the current fusion module, observation interaction module, future feedback module and global fusion module, in which the future feedback module can enable the understanding of pre-action by feeding the influence of preview information to feedforward prediction. Thirdly, the comprehensive interaction features are further fed into final predictor to generate the joint predicted trajectories of multiple agents. Extensive experimental results show that our FFINet achieves the state-of-the-art performance on Argoverse 1 and Argoverse 2 motion forecasting benchmarks.